
Attic or Garret
M5Stack‚ًژg‚ء‚ؤ‚ف‚é
Introduction
M5Stack/M5Camera/M5Stick/M5Atom/M5Stamp
‚»‚ꂼ‚êƒRƒ“ƒpƒNƒg‚بƒPپ[ƒX‚ة‘ٍژR‚ج‹@”\‚ھ‹l‚ـ‚ء‚½–£—ح“I‚بIoTƒfƒoƒCƒX
ƒ}ƒCƒRƒ“گ¢‘م‚ج‚ذ‚ئ‚حM5‚ئ’®‚‚ئSORD m5‚ًژv‚¢ڈo‚·‚ح‚¸w
‰ًگح‚ئ“®‚ƒچƒ{ƒbƒg‚جگ»چى‚ب‚ا‚µ‚ؤ‚¢‚ـ‚·پB
“à—e‚حIndex‚ة‚ـ‚ئ‚ك‚ؤ‚¢‚ـ‚·پB‚¨چD‚ف‚ج“à—e‚ً‚ـ‚ء‚½‚è‚ئ‚²——‰؛‚³‚¢پB(^_^)
”ُ–Yک^‚àŒ“‚ث‚ؤ‚¢‚ـ‚·پBƒoپ[ƒWƒ‡ƒ“‚ب‚ا‚جˆل‚¢‚ة‚و‚ء‚ؤژg‚¢•û‚ھ•د‚ي‚ء‚ؤ‚¢‚é‰آ”\گ«‚à‚ ‚é‚ج‚إ‚²’چˆس‚‚¾‚³‚¢پB
’·‚‚ب‚ء‚½‚ج‚إMicroPython•ز‚ح•تƒyپ[ƒW‚ة‚ـ‚ئ‚ك‚ـ‚µ‚½پB
ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚ً’کژز‚ة–³’f‚إ“]چع‚ ‚é‚¢‚حڈ¤‹ئ–ع“I‚إ—ک—p‚·‚邱‚ئ‚ً‹ضژ~‚µ‚ـ‚·پB ‰ü‘¢“™‚حŒآگl‚جگس”C‚ج‚à‚ئ‚ةچs‚ء‚ؤ‰؛‚³‚¢پB”گ¶‚µ‚½ژ–ŒجپAŒجڈل‚ب‚ا‚ة‘خ‚µ‚ؤˆêگط‚جگس”C‚ًژ‚؟‚ـ‚¹‚ٌپB ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚جƒAƒCƒfƒA‚ً—¬—p‚µ‚½چى•iپA‚¨‚و‚رŒِٹJ‚µ‚ؤ‚¢‚é“ئژ©‚ج‰ًگحŒ‹‰ت‚ًٹـ‚قڈî•ٌ‚ًپASNSپAƒuƒچƒOپAڈ‘گذ‚ب‚ا‚إ”•\‚·‚éچغ‚ح‚²ˆê•ٌ‚‚¾‚³‚¢پB‚±‚؟‚ç‚جƒTƒCƒg‚ض‚جƒٹƒtƒ@ƒŒƒ“ƒX(ƒٹƒ“ƒN)‚ً‰ء‚¦‚ؤ‚‚¾‚³‚¢پB
‰ü‘¢‚ة‚و‚è“d”g–@ˆل”½‚ئ‚ب‚é‰آ”\گ«‚ھ‚ ‚è‚ـ‚·پB“–ƒTƒCƒg‚إ‚ح“KژپA“dژ¥”gکR‰k‘خچô‚ًچs‚ء‚ؤ‚¨‚è“d”g–@‚ج“K—p”حˆح“à‚إژہŒ±‚µ‚ؤ‚¢‚ـ‚·پB‰ü‘¢‚حژ©Œبگس”C‚إ‚¨ٹè‚¢‚µ‚ـ‚·پB ‹Z“K(چHژ–گفŒv”Fڈط)‚ةٹض‚·‚éڈî•ٌ پ¨
‚»‚ꂼ‚êƒRƒ“ƒpƒNƒg‚بƒPپ[ƒX‚ة‘ٍژR‚ج‹@”\‚ھ‹l‚ـ‚ء‚½–£—ح“I‚بIoTƒfƒoƒCƒX
ƒ}ƒCƒRƒ“گ¢‘م‚ج‚ذ‚ئ‚حM5‚ئ’®‚‚ئSORD m5‚ًژv‚¢ڈo‚·‚ح‚¸w





“à—e‚حIndex‚ة‚ـ‚ئ‚ك‚ؤ‚¢‚ـ‚·پB‚¨چD‚ف‚ج“à—e‚ً‚ـ‚ء‚½‚è‚ئ‚²——‰؛‚³‚¢پB(^_^)
”ُ–Yک^‚àŒ“‚ث‚ؤ‚¢‚ـ‚·پBƒoپ[ƒWƒ‡ƒ“‚ب‚ا‚جˆل‚¢‚ة‚و‚ء‚ؤژg‚¢•û‚ھ•د‚ي‚ء‚ؤ‚¢‚é‰آ”\گ«‚à‚ ‚é‚ج‚إ‚²’چˆس‚‚¾‚³‚¢پB
’·‚‚ب‚ء‚½‚ج‚إMicroPython•ز‚ح•تƒyپ[ƒW‚ة‚ـ‚ئ‚ك‚ـ‚µ‚½پB
ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚ً’کژز‚ة–³’f‚إ“]چع‚ ‚é‚¢‚حڈ¤‹ئ–ع“I‚إ—ک—p‚·‚邱‚ئ‚ً‹ضژ~‚µ‚ـ‚·پB ‰ü‘¢“™‚حŒآگl‚جگس”C‚ج‚à‚ئ‚ةچs‚ء‚ؤ‰؛‚³‚¢پB”گ¶‚µ‚½ژ–ŒجپAŒجڈل‚ب‚ا‚ة‘خ‚µ‚ؤˆêگط‚جگس”C‚ًژ‚؟‚ـ‚¹‚ٌپB ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚جƒAƒCƒfƒA‚ً—¬—p‚µ‚½چى•iپA‚¨‚و‚رŒِٹJ‚µ‚ؤ‚¢‚é“ئژ©‚ج‰ًگحŒ‹‰ت‚ًٹـ‚قڈî•ٌ‚ًپASNSپAƒuƒچƒOپAڈ‘گذ‚ب‚ا‚إ”•\‚·‚éچغ‚ح‚²ˆê•ٌ‚‚¾‚³‚¢پB‚±‚؟‚ç‚جƒTƒCƒg‚ض‚جƒٹƒtƒ@ƒŒƒ“ƒX(ƒٹƒ“ƒN)‚ً‰ء‚¦‚ؤ‚‚¾‚³‚¢پB
‰ü‘¢‚ة‚و‚è“d”g–@ˆل”½‚ئ‚ب‚é‰آ”\گ«‚ھ‚ ‚è‚ـ‚·پB“–ƒTƒCƒg‚إ‚ح“KژپA“dژ¥”gکR‰k‘خچô‚ًچs‚ء‚ؤ‚¨‚è“d”g–@‚ج“K—p”حˆح“à‚إژہŒ±‚µ‚ؤ‚¢‚ـ‚·پB‰ü‘¢‚حژ©Œبگس”C‚إ‚¨ٹè‚¢‚µ‚ـ‚·پB ‹Z“K(چHژ–گفŒv”Fڈط)‚ةٹض‚·‚éڈî•ٌ پ¨
Index
ƒnپ[ƒh•ز
- پE M5Stack / M5GO
- پE ƒhƒچپ[ƒ“Tello‚ًM5Stack‚إ”ٍ‚خ‚µ‚ؤ‚ف‚ـ‚µ‚½پB(ƒoƒCƒiƒٹپ[ƒ‚پ[ƒh)
- پE M5Stack—p‚جƒ‚پ[ƒ^پ[ƒ‚ƒWƒ…پ[ƒ‹‚ًژ©چى‚µ‚ؤ‚ف‚ـ‚µ‚½پB
- پE ƒpƒ`ƒpƒ`ƒNƒ‰ƒbƒsپ[[ƒgپ[ƒ‹ŒN]‚ًژ©‘–ژ®‚ة‚µ‚ـ‚µ‚½پB
- پE New AIBO•—‚جƒVƒbƒ|‚ً•t‚¯‚ـ‚µ‚½پB
- پE ƒpƒ`ƒpƒ`ƒNƒ‰ƒbƒsپ[[ƒgپ[ƒ‹ŒN]‚ج–ع‚ً“®‚‚و‚¤‚ة‚µ‚ـ‚µ‚½پB
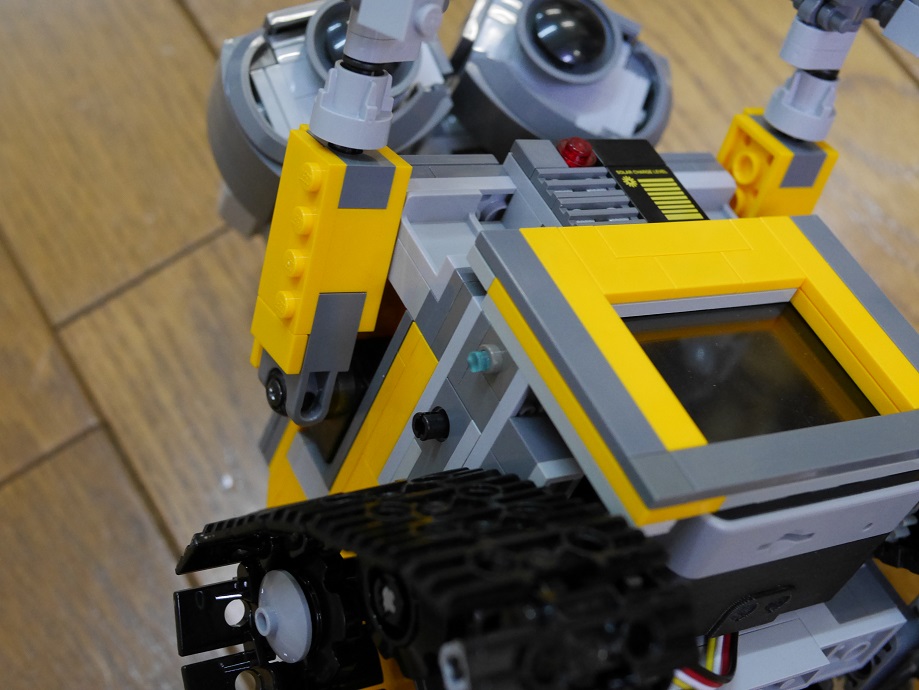
- پE M5Stack WALL-Eٹ®گ¬‚µ‚ـ‚µ‚½پI
- پE M5Stack‚إ‰ئ‚جƒhƒA‚ًƒپƒCƒhƒJƒtƒF•—‚ة‰ü‘¢‚µ‚ؤ‚ف‚½پB
- پE M5Stack‚إ“®‰وچؤگ¶
- پE M5Stack—p‚جƒvƒچƒgƒ‚ƒWƒ…پ[ƒ‹ƒPپ[ƒX
- پE M5Stack‚جƒXƒٹƒ€‰»+ƒoƒbƒeƒٹپ[—e—تƒAƒbƒv
- پE Stack-chan ƒTƒCƒhƒٹƒ| ƒ|ƒPƒbƒg”إ
- پE M5Camera
- پE M5Camera‚ئM5Stack‚ج‘o•ûŒü’تگM
- پE M5Camera‚جƒoƒbƒeƒٹپ[‹ى“®“dˆ³ƒAƒbƒv
- پE M5Tank‚ًچى‚ء‚ؤ‚ف‚½پB
- پE M5StickC
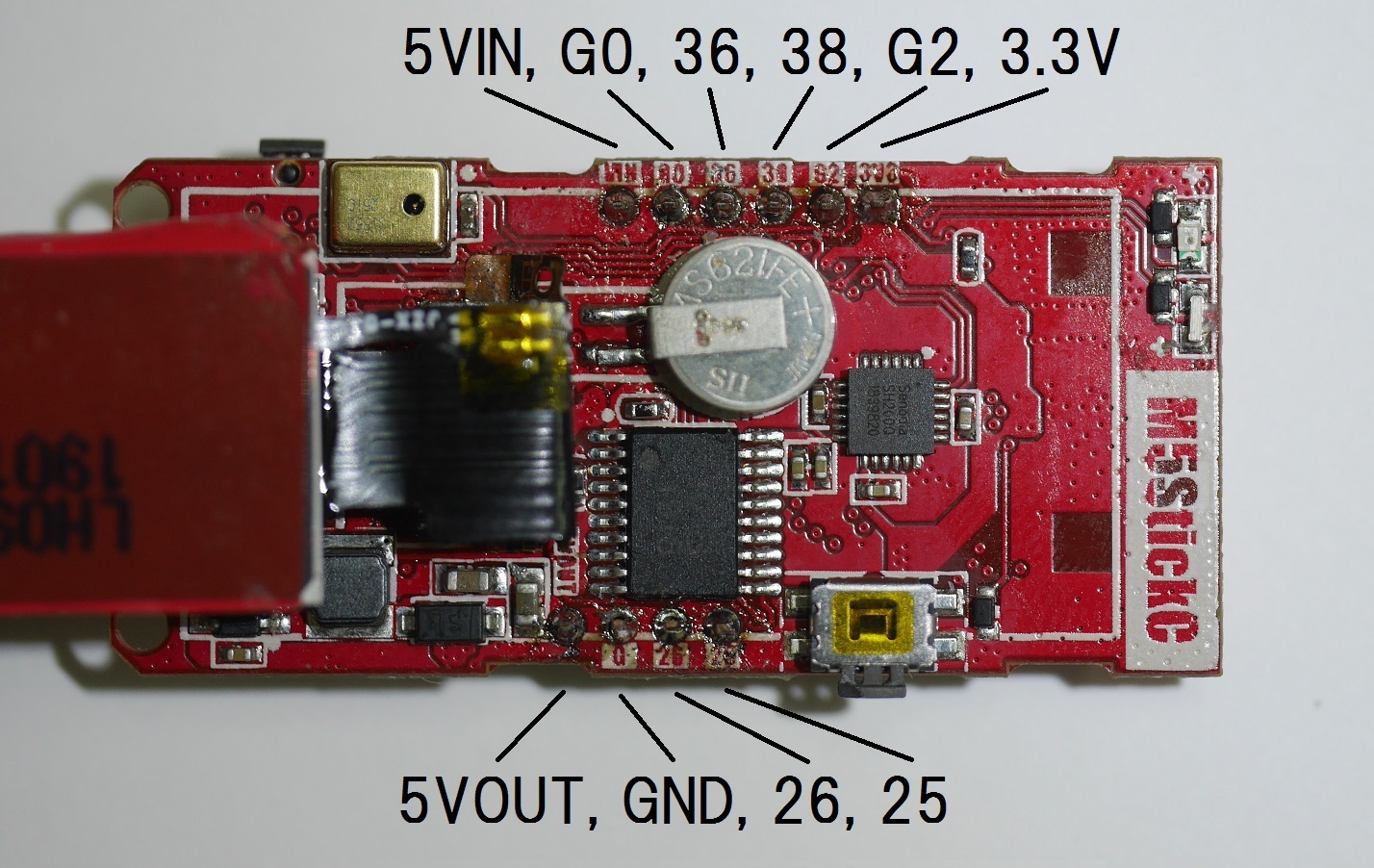
- پE M5StickC‚ج‰ًگح
- پE M5StickC‚جƒgƒ‰ƒuƒ‹‘خچô
- پE M5StickC‚ج“dˆ³ƒŒƒMƒ…ƒŒپ[ƒ^(DCDC)‚ً’²‚ׂؤ‚ف‚éپB
- پE M5StickC PLUS‚إ•د‚ي‚ء‚½‚ئ‚±‚ë
- پE M5StickC “à‘ںƒoƒbƒeƒٹپ[‚ج‰ك•ْ“d–â‘è (ERROR 22)
- پE M5Frisk‚ًچى‚ء‚ؤ‚ف‚½پB
- پE M5StickC‚جٹO•t‚¯ƒoƒbƒeƒٹپ[‚ًچى‚ء‚ؤ‚ف‚½پB
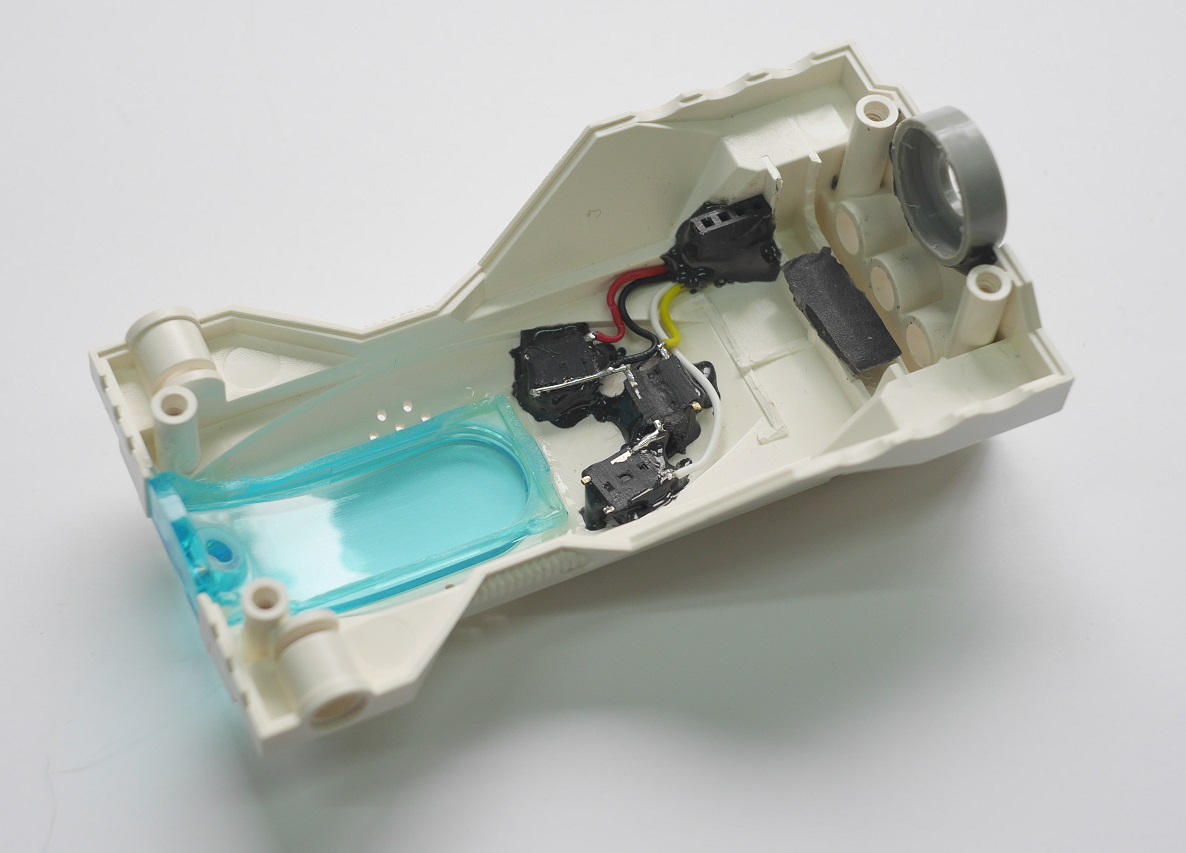
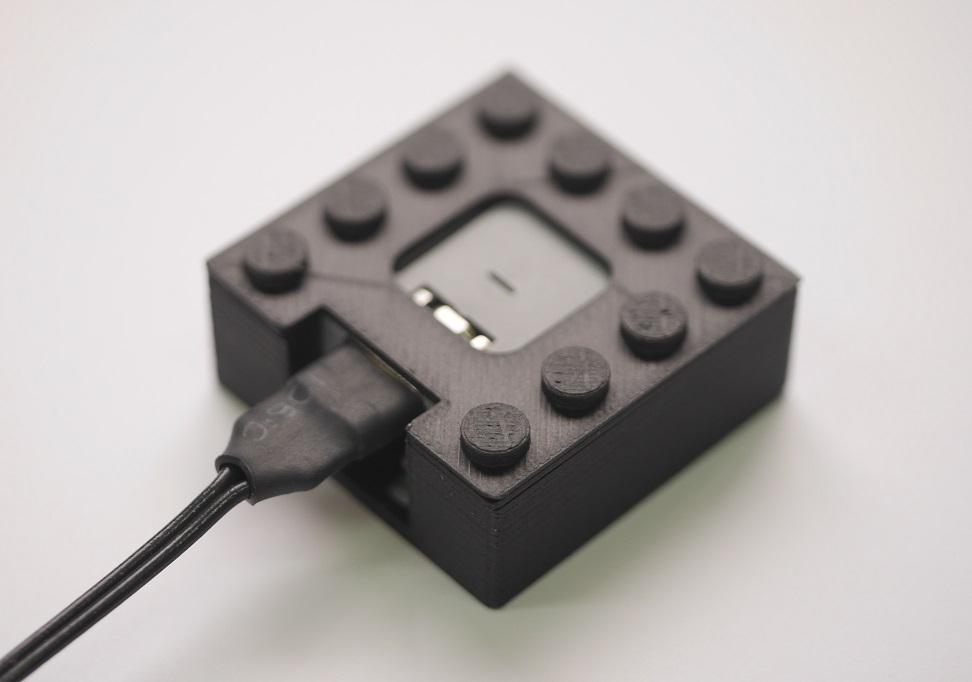
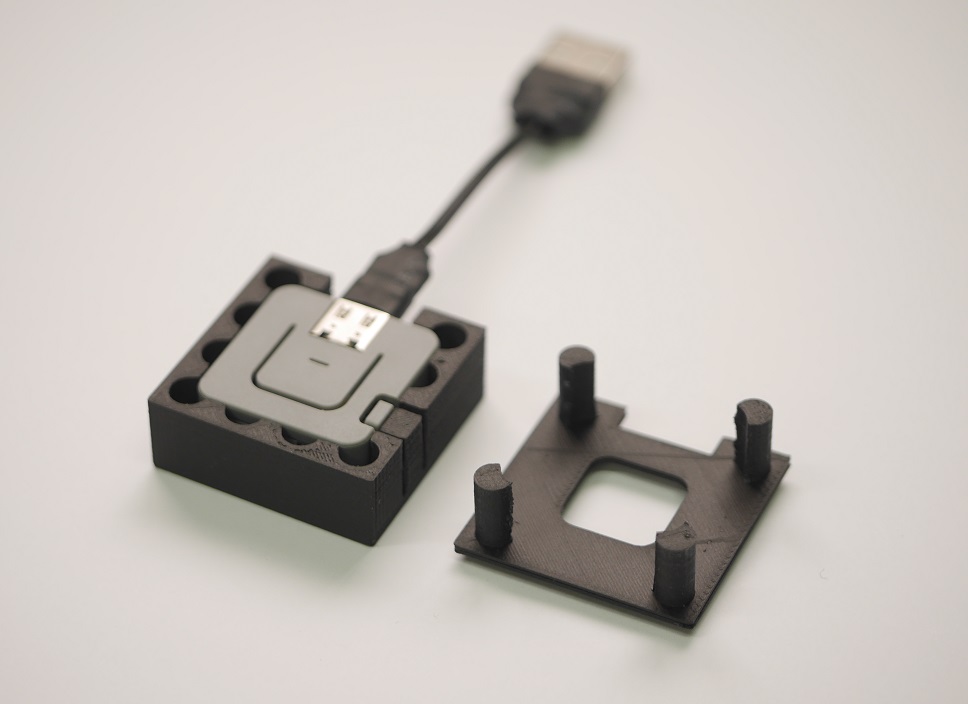
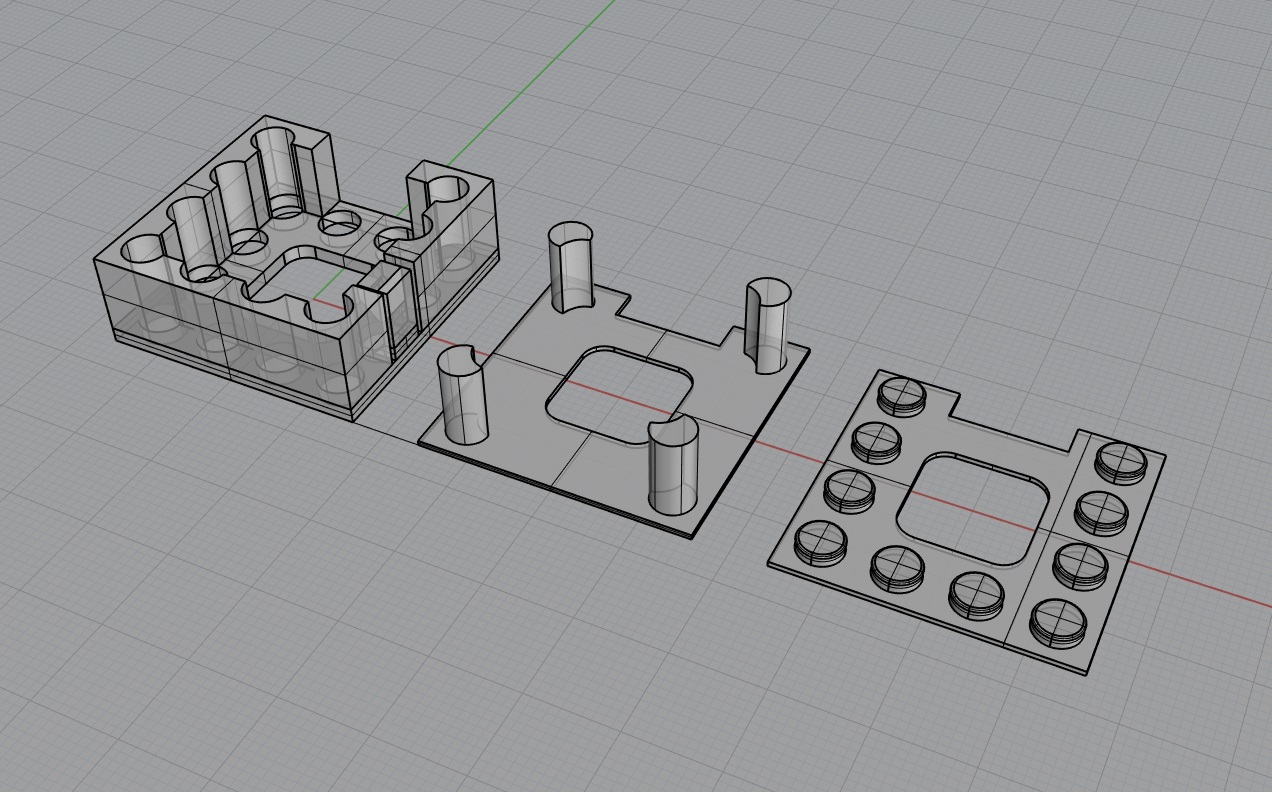
- پE M5StickC‚ًƒŒƒS ƒ}ƒCƒNƒچƒXƒJƒEƒg(LEGO 9748)‚ة‚¢‚ê‚ؤ‚ف‚½پB
- پE M5StickC‚إƒŒƒS ƒtƒBƒAƒbƒg500(LEGO 10271)‚ً‘–‚点‚ؤ‚ف‚½پB
- پE M5Stack Japan Creativity Contest 2024‚إM5‚إƒ‰ƒWƒRƒ“‰»‚µ‚½ƒŒƒS FIAT500‚ھ“üڈـ‚µ‚ـ‚µ‚½پI
- پE M5Atom-Lite / M5Atom-Matrix / M5Atom-Echo
- پE M5Atom‚ج‰ًگح
- پE M5Atom‚جƒoƒbƒeƒٹپ[‚ًچى‚ء‚ؤ‚ف‚½پB
- پE M5Atom Lite‚ة9ژ²ƒZƒ“ƒTپ[‚ً’ا‰ء‚µ‚ؤ‚ف‚½پB
- پE M5Atom‚جƒŒƒSƒ}ƒEƒ“ƒ^‚ًچى‚ء‚ؤ‚ف‚½پB
- پE M5Atom WALL-Eٹ®گ¬‚µ‚ـ‚µ‚½پI
- پE M5Atom 2‘«•àچsƒچƒ{ NanoWalker U800
- پE M5Stack Japan Creativity Contest 2020‚إNanoWalker U800‚ھ“üڈـ‚µ‚ـ‚µ‚½پI
- پE NanoWalker U800‚ةڈو‚ء‚½ƒŒƒS‚جƒ~ƒjƒtƒBƒO‚ةƒ‰ƒCƒgƒZپ[ƒoپ[‚ًگU‰ٌ‚³‚¹‚ؤ‚ف‚ـ‚µ‚½پB
- پE M5Atom‚إƒvƒbƒVƒ…ƒtƒHƒ“Œ^ƒLپ[ƒ{پ[ƒh‚ًچى‚ء‚ؤ‚ف‚½
- پE M5Atom‚إƒTپ[ƒ}ƒ‹ƒvƒٹƒ“ƒ^‚ةˆَچü‚µ‚ؤ‚ف‚½
- پE M5Atom‚إƒLƒrƒLƒr“®‚NanoRolling‚ًچى‚ء‚ؤ‚ف‚½پB
- پE M5Atom‚إƒ~ƒjƒtƒBƒO‚ً“®‚©‚µ‚ؤ‚ف‚½پB
- پE M5AtomS3‚ج‰ًگح
- پE M5AtomS3”إ‚ةNanoRolling‚ًƒoپ[ƒWƒ‡ƒ“ƒAƒbƒv‚µ‚ؤ‚ف‚½پB
- پE M5Stack Japan Creativity Contest 2023‚إNanoRolling‚ھ“üڈـ‚µ‚ـ‚µ‚½پI
- پE M5AtomƒVƒٹپ[ƒY—p‚جƒ~ƒjƒtƒBƒOƒAƒ_ƒvƒ^
- پE M5Stamp
- پE M5Stamp‚إچإڈ¬‹‰NanoTank‚ًچى‚ء‚ؤ‚ف‚½پB
- پE TechGlassTube‚ًچى‚ء‚ؤ‚ف‚½پB
- پE M5Stackپiژ„گفپjƒTƒ|پ[ƒgƒZƒ“ƒ^پ[
- پE M5Atom Echo ƒXƒsپ[ƒJپ[‚ج•غŒى‘خچô
- پE M5AtomƒVƒٹپ[ƒY‚جUSBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚ة‚و‚éWi-Fi–â‘è
- پE ƒtƒ@پ[ƒ€ƒEƒFƒA‚جƒoƒbƒNƒAƒbƒv / ƒٹƒXƒgƒA
- پE M5Stack / M5Stick / M5Camera‚جI2C(Grove)ƒRƒlƒNƒ^
- پE M5Stack‚جI2C(Grove)‚ً’²‚ׂؤ‚ف‚éپB
- پE M5StickC‚جI2C(Grove)‚ً’²‚ׂؤ‚ف‚éپB
- پE M5Camera‚جI2C(Grove)‚ً’²‚ׂؤ‚ف‚éپB
- پE Other
- پE M5Stack Makeyƒ†ƒjƒbƒg‚جƒvƒچƒOƒ‰ƒ€ڈ‘‚«ٹ·‚¦
- پE M5Stack(M5GO)‚جڈ‰ٹْ•s—ا
- پE ڈ‰ٹْ‚جM5Stack‚جƒچƒbƒg
MicroPython•ز
- پE M5Stack (M5Stick / M5Atom / M5Camera / M5Stamp) ‚ًMicroPython‚إژg‚ء‚ؤ‚ف‚éپB
- پE MicroPython‚إƒTƒEƒ“ƒh‚ًژg‚ء‚ؤ‚ف‚éپB
- پE MicroPython‚إƒOƒ‰ƒtƒBƒbƒN‚ًژg‚ء‚ؤ‚ف‚éپB
- پE ‰tڈ»ƒfƒBƒXƒvƒŒƒC‚ًژg‚¤ [ originalƒٹƒrƒ‹ƒh”إ ]
- پE ‰tڈ»ƒfƒBƒXƒvƒŒƒC‚ًژg‚¤ [ originalƒٹƒrƒ‹ƒh”إ[S3] ]
- پE ‰tڈ»ƒfƒBƒXƒvƒŒƒC‚ًژg‚¤ (framebuf)
- پE ‰tڈ»ƒfƒBƒXƒvƒŒƒC‚ًژg‚¤ [ loborisƒٹƒrƒ‹ƒh”إ ]
- پE ‰tڈ»ƒfƒBƒXƒvƒŒƒC‚ًژg‚¤ [ loborisƒٹƒrƒ‹ƒh”إ + LovyanGFX ]
- پE ƒCƒپپ[ƒWƒfپ[ƒ^‚ًکA‘±•\ژ¦‚·‚é
- پE MicroPython‚إƒtƒ@ƒCƒ‹ƒVƒXƒeƒ€‚ًژg‚ء‚ؤ‚ف‚éپB
- پE MicroPython‚إƒZƒ“ƒTپ[‚ًژg‚ء‚ؤ‚ف‚éپB
- پE MicroPython‚إBluetooth‚ًژg‚ء‚ؤ‚ف‚éپB
- پE Bluetooth(Classic)‚ًژg‚¤ [ loborisƒٹƒrƒ‹ƒh”إ + btstack ]
- پE sixaxis (DUALSHOCK3)
- پE spp[Server] (Serial Port Profile)
- پE spp[Client] (Serial Port Profile)
- پE hid (Wii Remote/Other)
- پE hid[Slave] (Keyboard/Mouse)
- پE hciƒpƒPƒbƒg‚ًAndroid‚إƒLƒƒƒvƒ`ƒƒ‚µ‚ؤ‰ًگح
- پE Bluetooth(BLE)‚ًژg‚¤ [ originalƒٹƒrƒ‹ƒh”إ ]
- پE BLE Keyboard
- پE MicroPython‚إƒlƒbƒgƒڈپ[ƒN‚ًژg‚ء‚ؤ‚ف‚éپB
- پE MicroPython‚إCPUگ§Œن‚ًژg‚ء‚ؤ‚ف‚éپB
- پE MicroPython‚إƒfƒoƒCƒX‚ًژg‚ء‚ؤ‚ف‚éپB
- پE PMIC‚ًژg‚¤
- پE RTC‚ًژg‚¤
- پE ƒJƒپƒ‰‚ًژg‚¤
- پE DualShock/2‚ًژg‚¤
- پE MicroPython‚إWebAPI‚ًژg‚ء‚ؤ‚ف‚éپB
M5Stack / M5GO
ƒhƒچپ[ƒ“Tello‚ًM5Stack‚إ”ٍ‚خ‚µ‚ؤ‚ف‚ـ‚µ‚½پB(ƒoƒCƒiƒٹپ[ƒ‚پ[ƒh) (2018/06/12) Index
Index

ƒtƒ@پ[ƒ€‚حƒIƒtƒ‰ƒCƒ“”إ‚جm5stack-20180419-v0.3.9.bin‚ًژg‚¢‚ـ‚µ‚½پB
ƒoƒCƒiƒٹƒ‚پ[ƒh‚ب‚ج‚إƒJƒNƒJƒN‚µ‚ب‚¢‚إƒXƒ€پ[ƒY‚ة“®‚«‚ـ‚·پB
Tello‚جƒoƒCƒiƒٹگ§Œن‚حPingguSoft-pytello-09d98e0e1646‚©‚çMicroPython‚ةˆعگA‚µ‚ـ‚µ‚½پB
PingguSoft-pytello-09d98e0e1646.zip
M5Stack—p‚جƒ‚پ[ƒ^پ[ƒ‚ƒWƒ…پ[ƒ‹‚ًژ©چى‚µ‚ؤ‚ف‚ـ‚µ‚½پB(2018/06/24)Index

گفŒv“–ژپAM5StackٹEŒGڈ‰‚جƒچƒ{ƒbƒgƒJپ[پIM5BALA‚و‚èگوچsپI


ƒpƒ`ƒpƒ`ƒNƒ‰ƒbƒsپ[[ƒgپ[ƒ‹ŒN]‚ًژ©‘–ژ®‚ة‚µ‚ـ‚µ‚½پB(2018/07/01)

ƒNƒ‰ƒbƒsپ[‚àƒTپ[ƒ{‚إƒpƒ`ƒpƒ`‚µ‚ـ‚·پBƒپƒJ‚àٹ®‘S“à‘ںپAŒ³‚جƒXƒvƒٹƒ“ƒO‚ًگ¶‚©‚µ‚ؤ‚¢‚é‚ج‚إ‚µ‚ء‚©‚èƒpƒ`ƒpƒ`‚µ‚ـ‚·پB‚»‚µ‚ؤپIژè“®‚إ‚àƒpƒ`ƒpƒ`ڈo—ˆ‚éƒXƒeƒ‹ƒX‰ü‘¢‚ة‚ب‚ء‚ؤ‚¢‚ـ‚· (^_^) ƒCƒ“ƒ^پ[ƒtƒFپ[ƒX‚ًI2C(Grove) ‚ة‚µ‚½‚ج‚إM5Stack‚ة’¼Œ‹ڈo—ˆ‚ـ‚·پB




New AIBO•—‚جƒVƒbƒ|‚ً•t‚¯‚ـ‚µ‚½پB(2018/07/18)




ƒpƒ`ƒpƒ`ƒNƒ‰ƒbƒsپ[[ƒgپ[ƒ‹ŒN]‚ج–ع‚ً“®‚‚و‚¤‚ة‚µ‚ـ‚µ‚½پB(2018/08/11)

M5Stack WALL-Eٹ®گ¬‚µ‚ـ‚µ‚½پI(2018/07/24)






M5Stack‚إ‰ئ‚جƒhƒA‚ًƒپƒCƒhƒJƒtƒF•—‚ة‰ü‘¢‚µ‚ؤ‚ف‚½پB (2018/10/19)Index
‰¹ٹ„‚ê‘خچô‚ئ‚µ‚ؤ‰¹گ؛ƒtƒ@ƒCƒ‹‚ح”gŒ`•زڈWƒ\ƒtƒg‚ًژg‚ء‚ؤ‰¹—ت‚ً‰؛‚°‚ؤ‚¢‚ـ‚·پB
پi—تژq‰»ƒrƒbƒgگ”‚ھ‹]گµ‚ة‚ب‚è‚ـ‚·پBپj
M5Stack‚إ“®‰وچؤگ¶ (2019/04/09-)Index
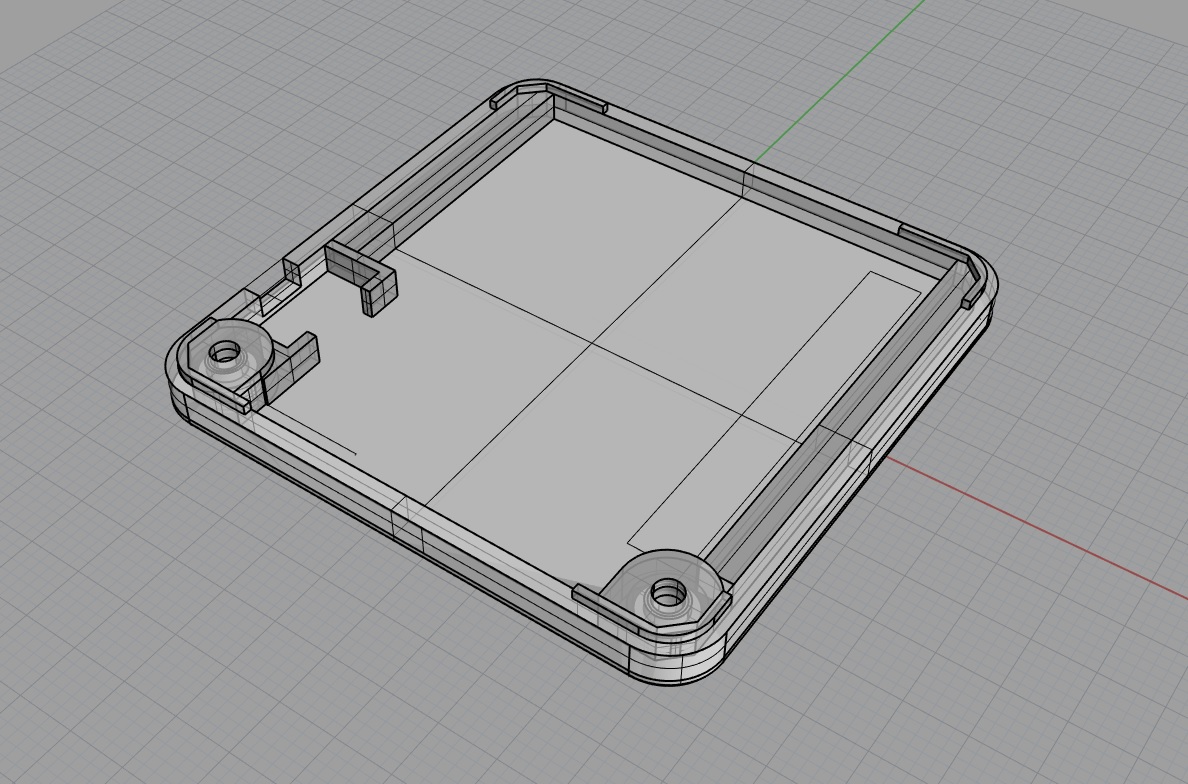
M5Stack—p‚جƒvƒچƒgƒ‚ƒWƒ…پ[ƒ‹ƒPپ[ƒX (2018/10/25)Index
ƒPپ[ƒX‚ًژ©چى‚·‚é•û‚ج‚½‚ك‚ةƒvƒچƒgƒ‚ƒWƒ…پ[ƒ‹ƒPپ[ƒX‚جCADƒfپ[ƒ^‚ًŒِٹJ‚µ‚ـ‚·پBژہ•¨‚ًچجگ،‚µ‚ؤCAD‰»‚µ‚ؤ‚¢‚ـ‚·پBFDM‚ج3Dƒvƒٹƒ“ƒ^‚إڈo—ح‚µ‚â‚·‚¢‚و‚¤‚ةچإ“K‰»‚µ‚ؤ‚¢‚ـ‚·پB
’ـ‚ج•”•ھ‚àڈo—ح‚³‚ê‚ـ‚·پB
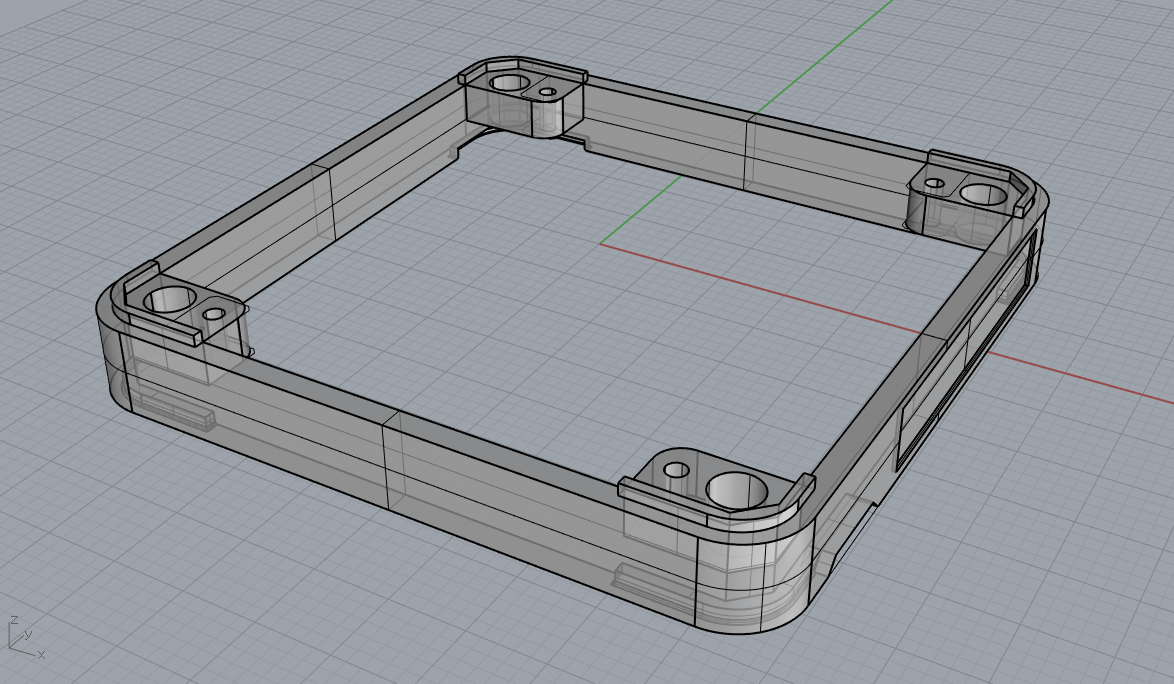
M5Stackژذ‚ھƒ‚ƒfƒ‹ƒfپ[ƒ^‚ًŒِٹJ‚µ‚ـ‚µ‚½(2021/11/04) پ¨ M5_Hardware
M5Stack‚جƒXƒٹƒ€‰»+ƒoƒbƒeƒٹپ[—e—تƒAƒbƒv (2019/11/23-)Index
ƒoƒbƒeƒٹپ[—e—ت‚ً1200mAh‚ةƒoƒbƒeƒٹپ[‚ةچ‡‚ي‚¹‚ؤƒXƒٹƒ€ƒPپ[ƒX‚ًچى‚è‚ـ‚·پB•¨—ƒXƒCƒbƒ`‚à‚آ‚¯‚ـ‚µ‚½پB(Linkman SS-12E01G3)
‚ ‚ي‚¹‚ؤƒLƒƒƒ‰ƒپƒ‹ƒCƒGƒچپ[‚ة“h‘•‚µ‚ؤ‚¢‚ـ‚·پB


Œإ’èƒ{ƒ‹ƒg‚حM5Stack(BASIC)‚جƒ{ƒgƒ€‚ج‚à‚ج‚ھژg‚¦‚ـ‚·پB
ƒPپ[ƒXƒfپ[ƒ^‚جSTLƒtƒ@ƒCƒ‹‚ً’u‚¢‚ؤ‚¨‚«‚ـ‚·پB 3Dƒvƒٹƒ“ƒ^(FDM)‚إڈo—حڈo—ˆ‚é‚و‚¤‚ة’²گ®‚µ‚ؤ‚¢‚ـ‚·پB
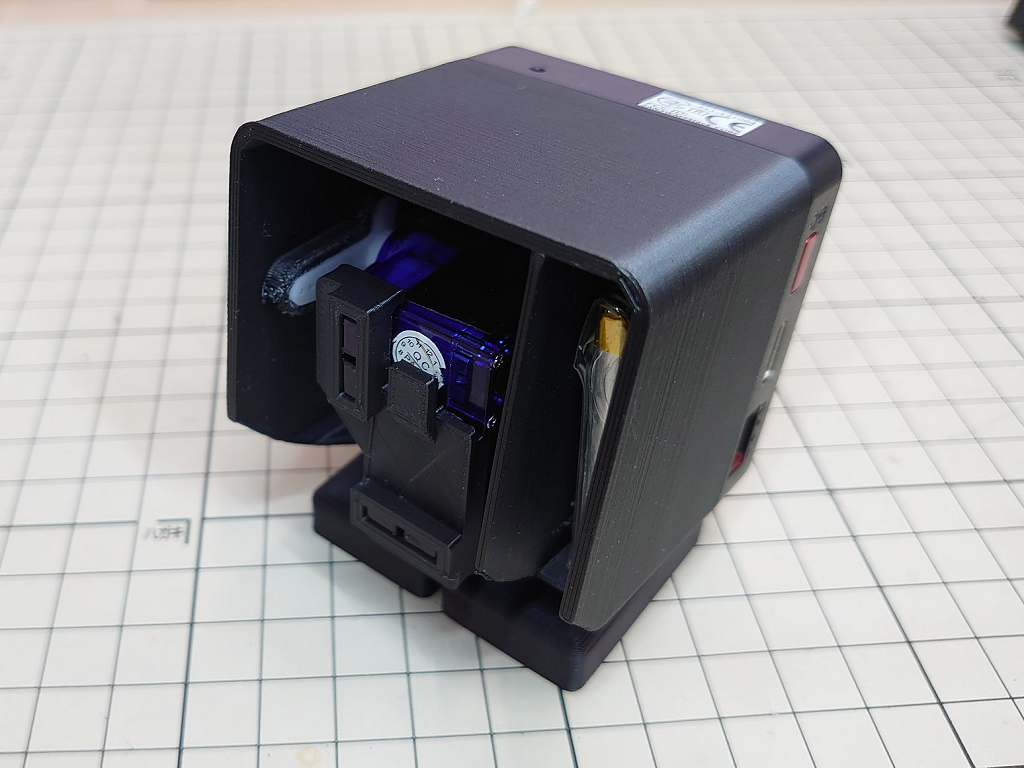
Stack-chan ƒTƒCƒhƒٹƒ| ƒ|ƒPƒbƒg”إ (2021/12/31)Index
ƒXƒ^ƒbƒN‚؟‚ل‚ٌ‚ةLi-Po—p‚جƒTƒCƒhƒ|ƒPƒbƒg‚ً‚آ‚¯‚ؤ‚ف‚ـ‚µ‚½پB1000mAh‚‚ç‚¢‚جƒٹƒ|‚ھ“ü‚è‚ـ‚·پB’†گSژ²•t‹ك‚ةٹi”[‚·‚é‚ج‚إڈd—تƒoƒ‰ƒ“ƒX‚ح—ا‚¢ٹ´‚¶پiƒTپ[ƒ{‚ة—D‚µ‚¢پjگخگى‚³‚ٌ‚ج–{‰ئSG90”إ‚ج‰ü•دƒoپ[ƒWƒ‡ƒ“‚ة‚ب‚è‚ـ‚·پBbracket_SG90_f‚ح‰~’Œ•”•ھ‚ھ11mm’Z‚‚ب‚è‚ـ‚·پB

M5Camera
M5Camera‚ئM5Stack‚ج‘o•ûŒü’تگM (2019/01/23)Index


ڈع‚µ‚‚حپ¨ MicroPython•زپuژB‰eƒfپ[ƒ^‚ًژو“¾‚·‚éپv
M5Camera‚جƒoƒbƒeƒٹپ[‹ى“®“dˆ³ƒAƒbƒv (2019/03/23)Index
M5Camera‚ة‚حƒoƒbƒeƒٹپ[‚ًŒq‚®‚±‚ئ‚ھڈo—ˆ‚ـ‚·پBUSBƒRƒlƒNƒ^‚©‚ç“d—ح‚ً‹ں‹‹‚·‚é‚ئڈ[“d‚³‚ê‚ـ‚·پBپiTP4057Œo—Rپj
M5Camera‚ة‚ح5V‚جڈ¸ˆ³‰ٌکH‚ھ‚ب‚¢‚½‚كپA‰ٌکH‚ج“r’†‚ةڈ¸ˆ³‰ٌکH‚ً“ü‚ê‚ؤƒoƒbƒeƒٹپ[‚©‚ç‚ج“d—ح‹ں‹‹‚إ‚àˆہ’肵‚½5V‚ھڈo—ح‚³‚ê‚é‚و‚¤‚ة‚µ‚ـ‚µ‚½پB
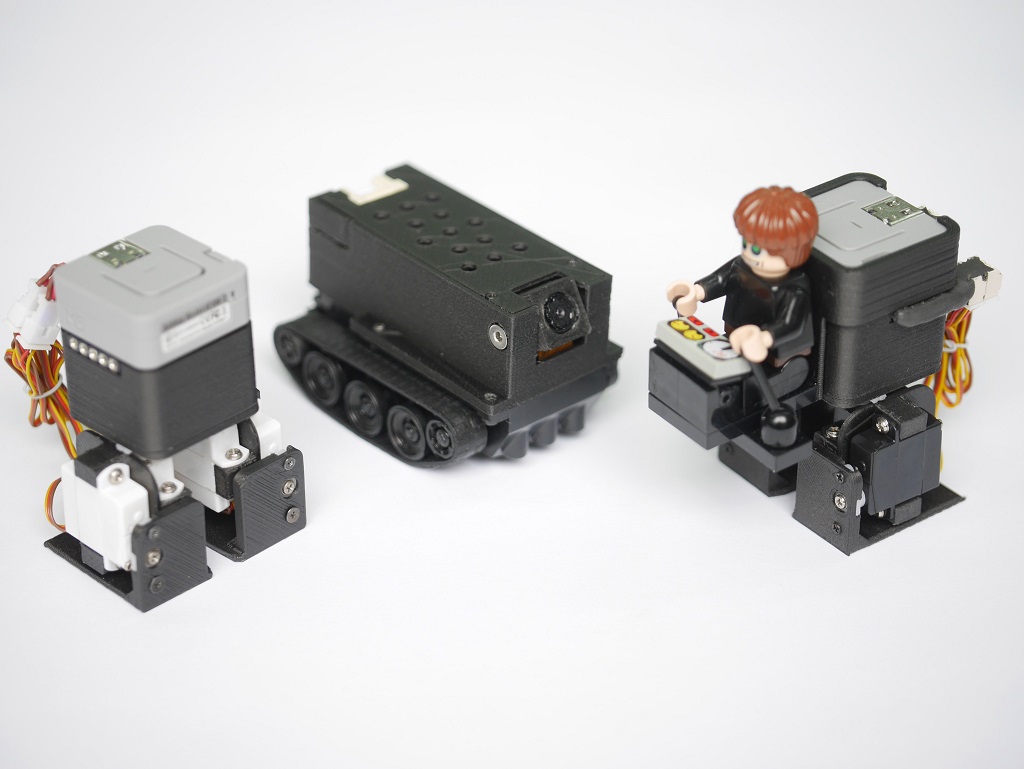
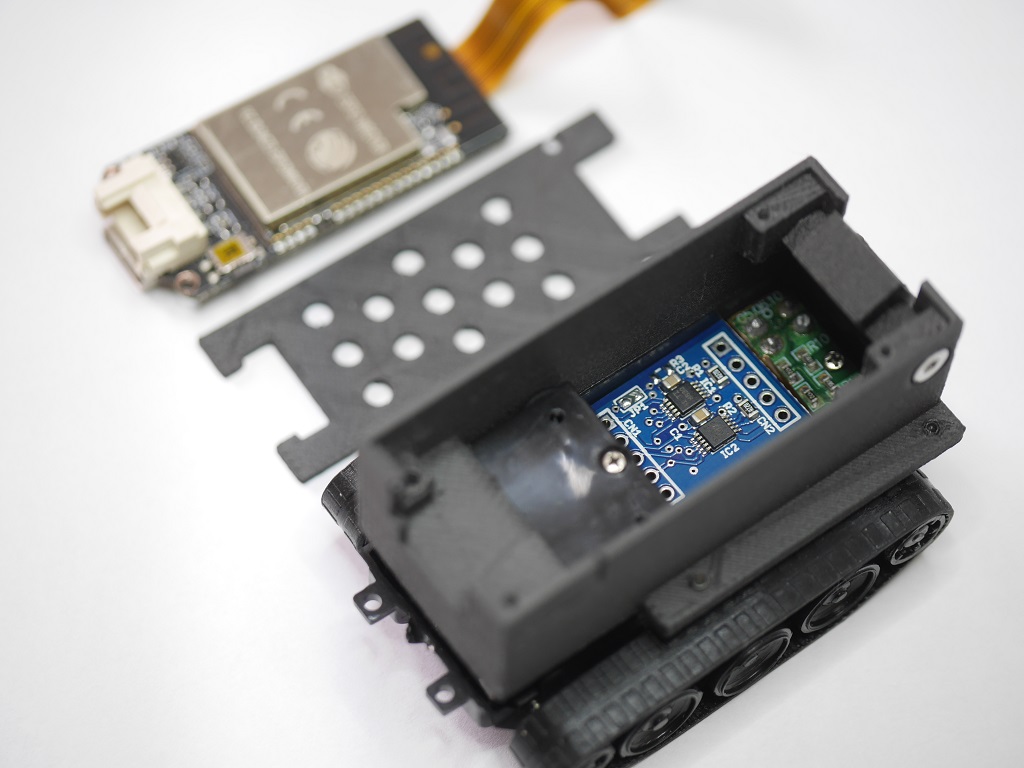
M5Tank‚ًچى‚ء‚ؤ‚ف‚½پB (2020/05/31-)Index
’´ڈ¬Œ^گيژش‚ًچى‚è‚ـ‚µ‚½پBM5Camera‚ً“à‘ ‚µ‚ؤ‚¢‚é‚ج‚إƒJƒپƒ‰‰و‘œ‚ًŒ©‚ب‚ھ‚ç‘€ڈc‚إ‚«‚ـ‚·پB

M5StickC
M5StickC‚ج‰ًگح (2019/06/06-)Index
M5Stackƒtƒ@ƒ~ƒٹپ[چإگV‚جM5StickC‚ھچ‘“à”ج”„‚³‚ê‚ـ‚µ‚½پBڈ¬‚³‚‚ؤ‚àٹg’£گ«‚ھچl—¶‚³‚ê‚ؤ‚¢‚é‚ج‚إ‚ئ‚ؤ‚à–£—ح“I‚بƒAƒCƒeƒ€‚إ‚·پBM5StackپAM5Stick(–³ˆَ)‚ئ”ن‚ׂé‚ئژں‚جٹî–{ژd—l‚ھ•دچX‚³‚ê‚ؤ‚¢‚ـ‚·پB‚±‚ê‚ة‚و‚èچ،‚ـ‚إ‚ئڈںژè‚ھ•د‚ي‚ء‚ؤ‚¢‚ـ‚·پB

M5StickC‚جƒgƒ‰ƒuƒ‹‘خچô (2019/06/06)
چ،‚ج‚ئ‚±‚ë‰؛‹L‚جڈاڈَ‚ح‘خڈˆ•û–@‚ھ•ھ‚è‚ـ‚µ‚½پB‡@ “dŒ¹‚ً“ü‚ê‚ؤ‚à‰و–ت‚ھگ^‚ءچ•‚ج‚ـ‚ـ”½‰‚µ‚ب‚¢
ƒoƒbƒeƒٹپ[‚جژc—ت‚ھڈ‚ب‚¢ڈêچ‡‚ة‹N‚«‚é‚و‚¤‚إ‚·پB‚µ‚ء‚©‚èڈ[“d‚µ‚ؤچؤ“x“dŒ¹‚ً“ٹ“ü‚µ‚ؤ‚à”½‰‚ھ–³‚¢‚ئ‚«‚حesptool‚ًژg‚ء‚ؤƒtƒ@پ[ƒ€‚ًڈمڈ‘‚«‚·‚é‚ئپAڈ‘‚«چ‚فŒم‚ة‹N“®‚µ‚ـ‚·پBپiƒoƒbƒNƒAƒbƒv‚ً–Y‚ꂸ‚ةپj‡A esptool‚ًژg‚¤‚ئƒGƒ‰پ[‚ھ”گ¶‚·‚éپB
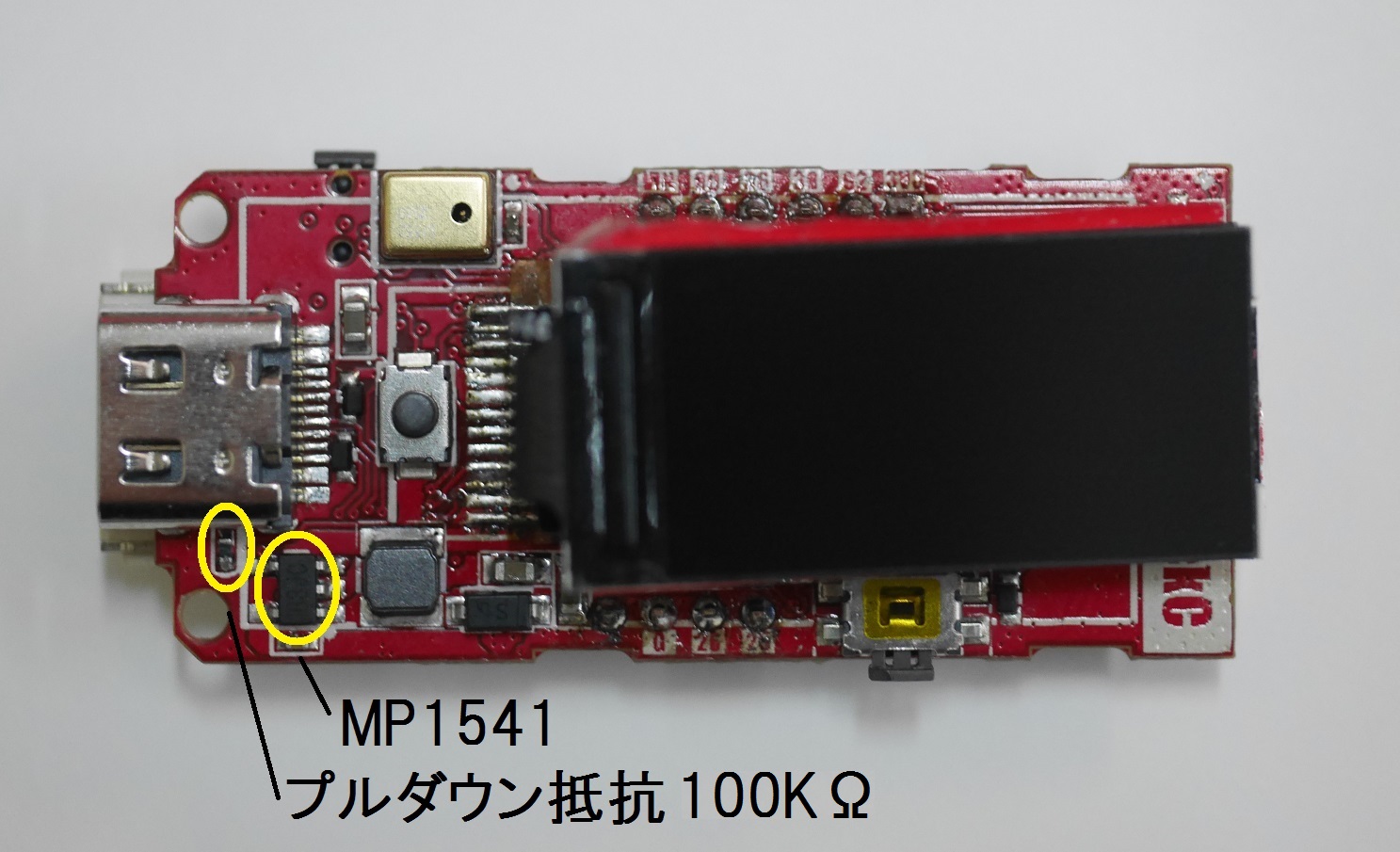
USBƒVƒٹƒAƒ‹•دٹ·IC‚ھ•د‚ي‚ء‚½ژ–‚ة‚و‚èOS‚جٹآ‹«‚ة‚و‚ء‚ؤ”گ¶‚·‚é‚و‚¤‚إ‚·پBƒ{پ[ƒŒپ[ƒg‚ً‰؛‚°‚邱‚ئ‚إگ³ڈي‚ة“®چى‚µ‚ـ‚·پB(750000پA500000پA250000پA115200)M5StickC‚ج“dˆ³ƒŒƒMƒ…ƒŒپ[ƒ^(DCDC)‚ً’²‚ׂؤ‚ف‚éپB (2020/02/15)
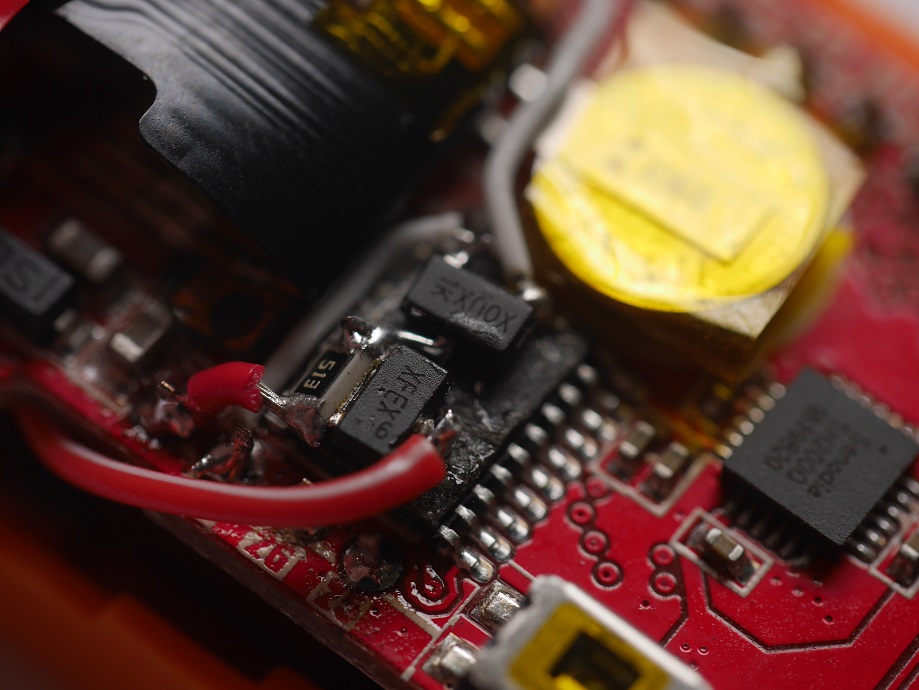
“dˆ³ƒŒƒMƒ…ƒŒپ[ƒ^(DCDC)‚ح MPS MP1541 (ژتگ^‚ج‰©گFٹغ‚ج‚ب‚©)چڈˆَ‚ھ"B3JC"‚µ‚©‚ب‚©‚ء‚½‚ج‚إ‹êکJ‚µ‚ـ‚µ‚½پc
ƒpƒڈپ[ƒ}ƒlƒWƒپƒ“ƒgIC AXP192

M5StickC PLUS‚إ•د‚ي‚ء‚½‚ئ‚±‚ë (2020/07/23-)
TFTƒXƒNƒٹپ[ƒ“‚ھ‘ه‚«‚‚ب‚ء‚½M5StickC‚جگVƒoپ[ƒWƒ‡ƒ“M5StickC PLUS‚ھ“oڈê!
| TFTƒXƒNƒٹپ[ƒ“ | ST7789V2 (1.14inch / 135 x 240dot) پ© ST7735S[R] (0.96inch / 80 x 160dot) |
| ƒuƒUپ[ | ’ا‰ء |
| IOڈo—ح | G25‚ً’ا‰ء (G36‚ئƒVƒFƒA) |
| ƒoƒbƒeƒٹپ[ | 120mAh پ© 80/95mAh |
M5StickC “à‘ںƒoƒbƒeƒٹپ[‚ج‰ك•ْ“d–â‘è (ERROR 22)
چw“üŒم‚جƒeƒXƒgƒvƒچƒOƒ‰ƒ€‚ھ“ü‚ء‚ؤ‚¢‚éڈَ‘ش‚إUSB‚ب‚ا‚جٹO•”“dŒ¹‚إ‹N“®‚µ‚½چغ‚ةERROR 22(Bat Vol error / check hardware)‚ھ”گ¶‚µ‚½‚ç“à‘ںƒoƒbƒeƒٹپ[‚ھ‰ك•ْ“d•غŒىƒ‚پ[ƒh‚ة‚ب‚ء‚ؤ‚¢‚ـ‚·پB گ”ƒ–ŒژٹشپAڈ[“d‚ً‚µ‚ب‚¢‚ئ”گ¶‚·‚é‰آ”\گ«‚ھچ‚‚¢‚إ‚·پB
ژèڈ‡‚ةڈ]‚ء‚ؤڈ[“d‚·‚邱‚ئ‚إ•œٹˆ‚µ‚ؤ‚àپAƒٹƒ`ƒEƒ€ƒCƒIƒ“ƒ|ƒٹƒ}پ[“d’r‚ھ–c’£‚·‚邱‚ئ‚ھ‚ ‚è‚ـ‚·پi–³ˆَ‚حŒ°’کپj–c’£‚·‚é‚ئƒPپ[ƒX‚جچ‡‚ي‚¹–ع‚جŒ„ٹش‚ھٹg‚ھ‚è‚ـ‚·پB”‰خ‚µ‚½ƒPپ[ƒX‚à‚ ‚邽‚كپA‚»‚ج‚ـ‚ـژg—p‚·‚邱‚ئ‚حٹ댯‚إ‚·پB“ْ–{‚جگ³‹K‘م—“X‚إ‚حپuڈ‰ٹْ•s—ا‚ج‚²‘ٹ’k‚حپAڈ¤•i“’…‚و‚è30“ْˆب“àپv‚ئ–¾‹L‚³‚ê‚ؤ‚¢‚ـ‚·پB
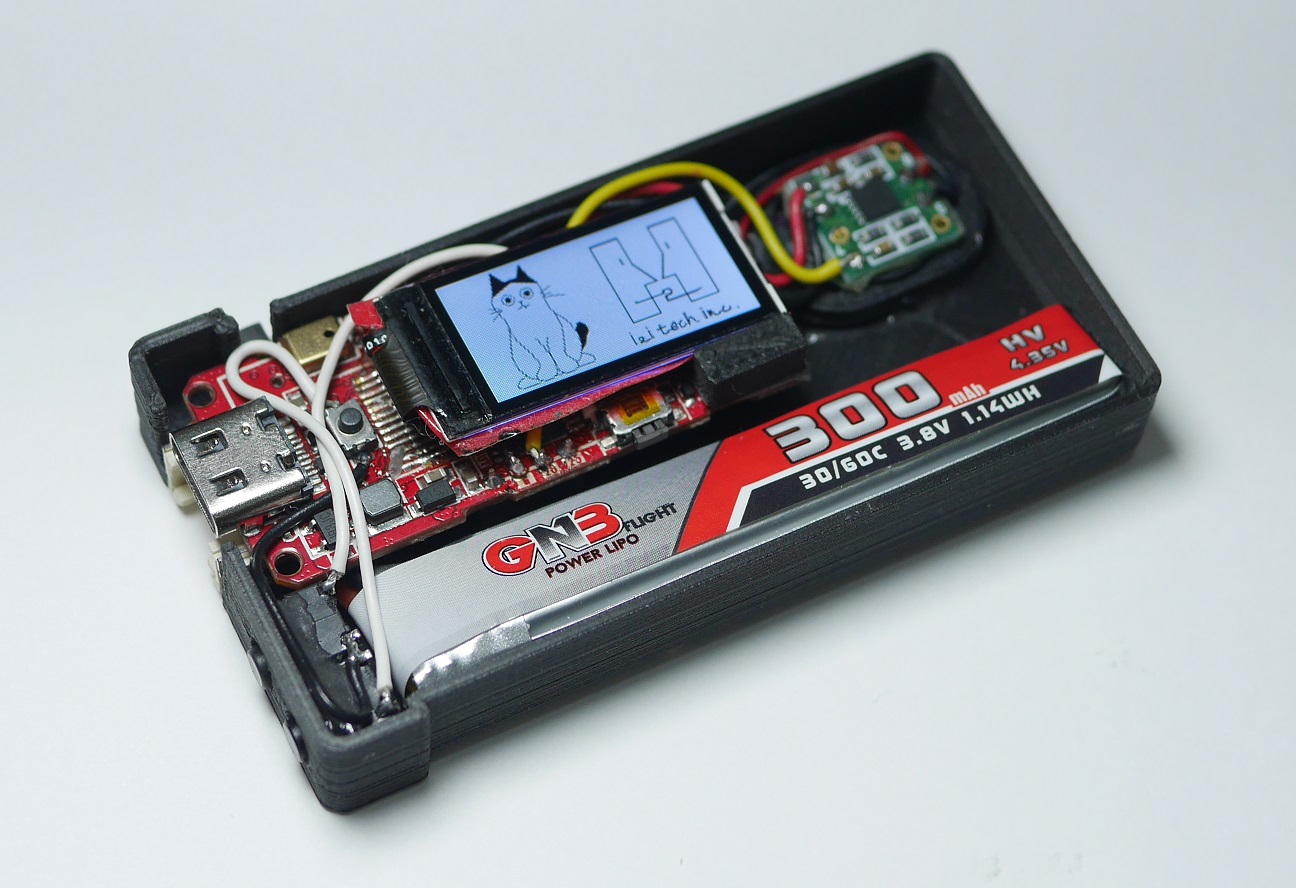
M5Frisk‚ًچى‚ء‚ؤ‚ف‚½پB(2019/06/28-)Index
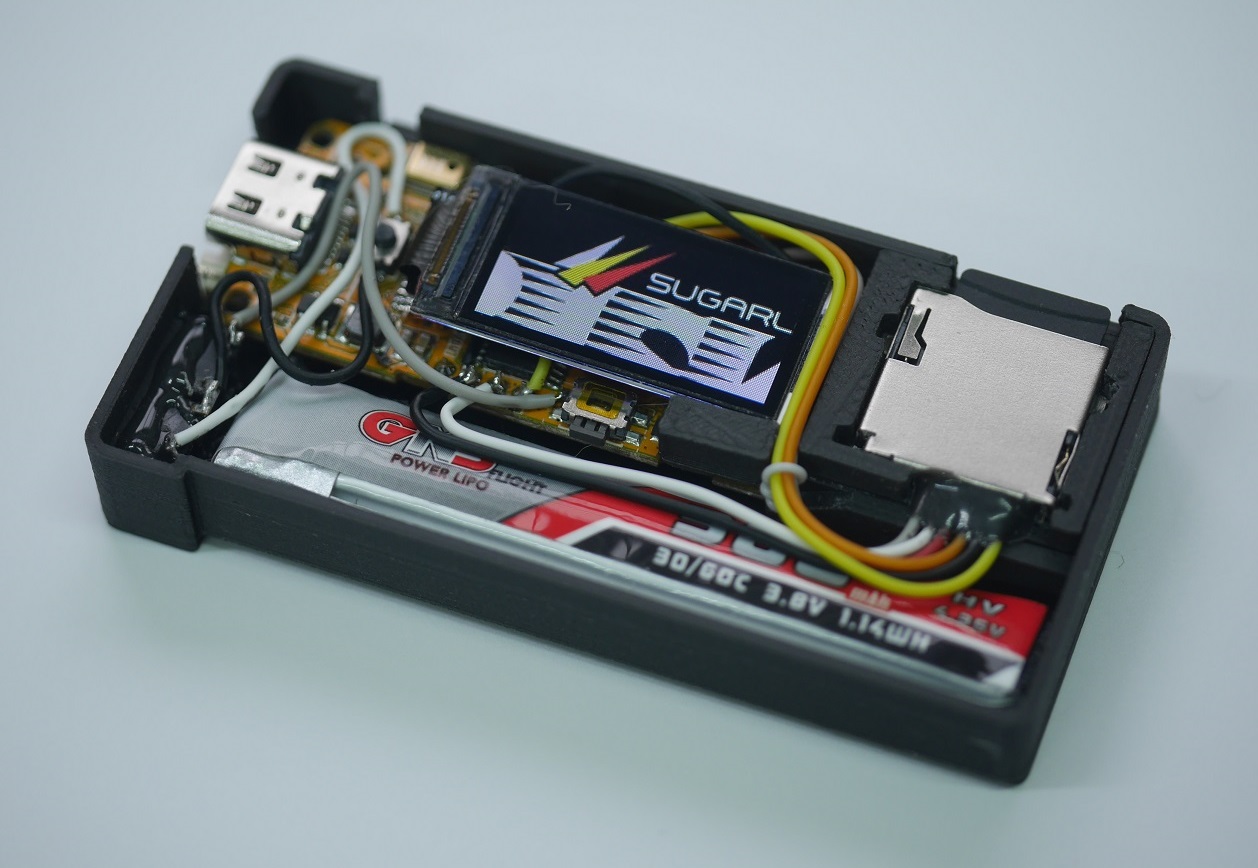
ƒtƒٹƒXƒN‚جCMپiHello,idea•زپj‚ًƒXƒ^ƒ“ƒhƒAƒچپ[ƒ“‚إچؤگ¶‚µ‚ؤ‚¢‚ـ‚·پB ƒXƒsپ[ƒJپ[’ا‰ءپAƒXƒCƒbƒ`پA”w–تٹg’£ƒRƒlƒNƒ^‚ًˆعگفپALiPo‚ً80mAh‚©‚ç300mAh‚ةƒAƒbƒv‚µ‚ؤ‚¢‚ـ‚·پB




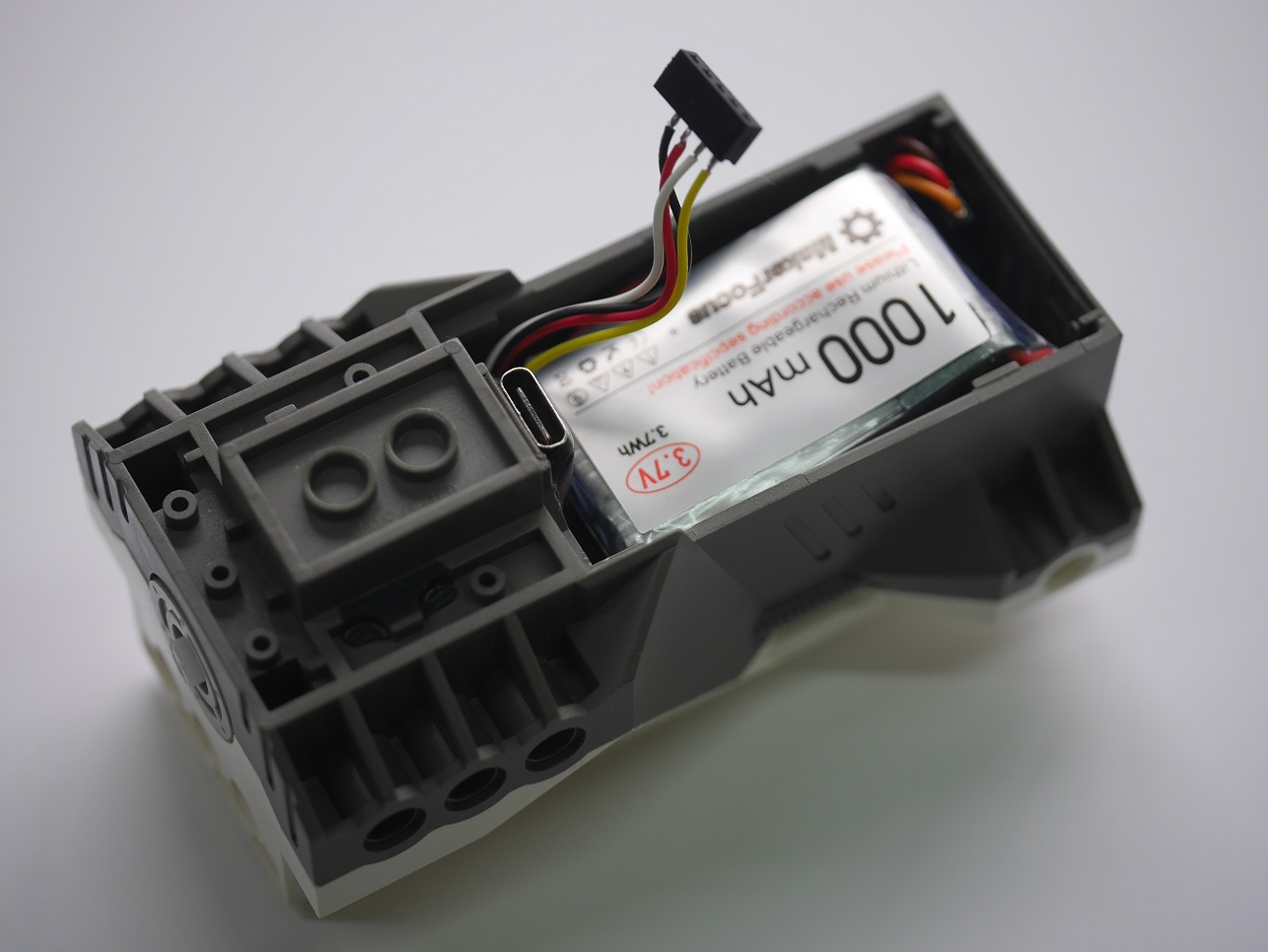
M5StickC‚جٹO•t‚¯ƒoƒbƒeƒٹپ[‚ًچى‚ء‚ؤ‚ف‚½پB (2020/02)Index
ƒ_ƒCƒ\پ[‚ج300‰~ƒ‚ƒoƒCƒ‹ƒoƒbƒeƒٹپ[‚ً‰ü‘¢‚µ‚ؤپAƒŒƒS‚ة•t‚¯‚ç‚ê‚éڈ¬‚³‚¢ƒoƒbƒeƒٹپ[‚ًچى‚è‚ـ‚µ‚½پB


M5StickC‚إUSB‚ج“dˆ³‚ًٹm”F‚µ‚ؤ“dˆ³‚ھ’ل‰؛‚µ‚½‚çƒVƒƒƒbƒgƒ_ƒEƒ“‚µ‚ـ‚·پB
“à•”‚جƒٹƒ|‚إ‹N“®‚µ‚½‚ئ‚«‚حƒVƒƒƒbƒgƒ_ƒEƒ“‚µ‚ـ‚¹‚ٌپB‚±‚ê‚إ“dŒ¹‚ة‚ـ‚آ‚ي‚éƒgƒ‰ƒuƒ‹‚©‚ç‰ً•ْ‚³‚ê‚ـ‚·
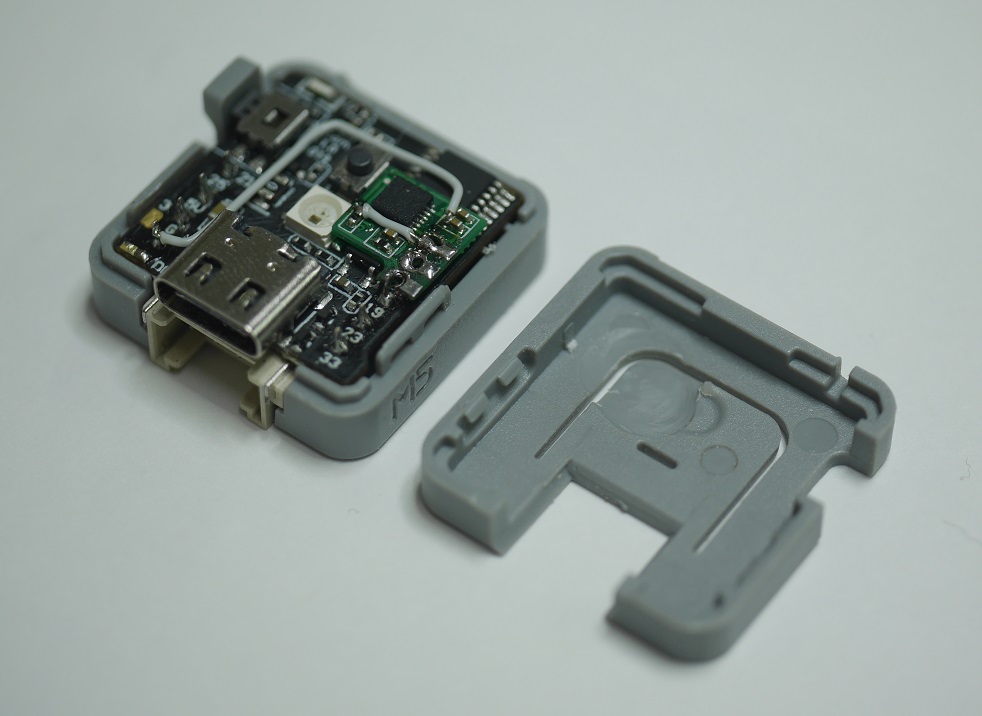
M5StickC‚ًƒŒƒS ƒ}ƒCƒNƒچƒXƒJƒEƒg(LEGO 9748)‚ة‚¢‚ê‚ؤ‚ف‚½پB(2020/03/07)Index
M5StickC‚ًƒ}ƒCƒNƒچپEƒXƒJƒEƒ^‚ة[–³—–î—پc]“ü‚ê‚ؤ‚ف‚ـ‚µ‚½پIپI




M5StickC‚إƒŒƒS ƒtƒBƒAƒbƒg500(LEGO 10271)‚ً‘–‚点‚ؤ‚ف‚½پB(2021/11/01)Index


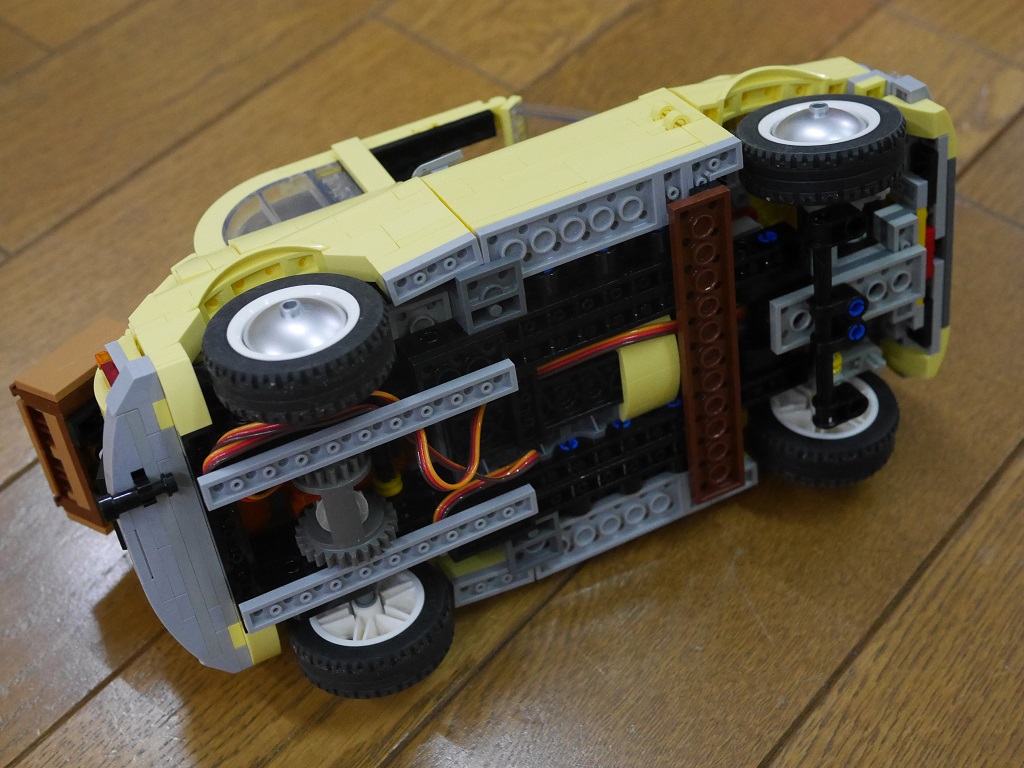
M5Stack Japan Creativity Contest 2024‚إM5‚إƒ‰ƒWƒRƒ“‰»‚µ‚½ƒŒƒS FIAT500‚ھ“üڈـ‚µ‚ـ‚µ‚½پI (2024/9/18)

Jimmyژذ’·‚©‚çپu“à•”‚جچׂ©‚¢گ»چى‰ك’ِ‚ھ’ڑ”J‚إ‰آˆ¤‚¢چى•i‚إ‚·پBپv‚ئƒRƒپƒ“ƒg‚ً’¸‚«‚ـ‚µ‚½پB
‚ئ‚ء‚ؤ‚àŒُ‰h‚إٹً‚µ‚¢‚إ‚·پI‘f“G‚ب‚¨Œ¾—tپA‚ ‚è‚ھ‚ئ‚¤‚²‚´‚¢‚ـ‚·پB
- پ¦ ڈ‰ٹْƒoپ[ƒWƒ‡ƒ“‚©‚çٹeڈٹƒAƒbƒvƒfپ[ƒg‚µ‚ؤ‚¢‚ـ‚·پB
M5Atom-Lite / M5Atom-Matrix / M5Atom-Echo
M5Atom‚ج‰ًگح (2020/04/14-)Index
- پE M5Atom‚حM5Stackژذ‚جگ»•i‚إ‚حچإڈ¬‚جƒVƒٹپ[ƒY
- پE M5Atom Lite‚حM5Stick‚©‚çپALCDپAƒoƒbƒeƒٹپ[پAPMICپARTCپAIMUپARTCپAMIC‚ًٹO‚µ‚½ڈَ‘ش‚ئ“¯‚¶
- پE M5Atom Matrix‚حM5Atom Lite‚ةLEDƒ}ƒgƒٹƒbƒNƒXٹî”آ‚ً’ا‰ء‚µ‚½‚à‚جپi’ا‰ءٹî”آ‚ةIMU MPU6886‚àژہ‘•پj
- پE USB‚©‚ç‚ج5V‚ح‹t—¬–hژ~ƒ_ƒCƒIپ[ƒh‚ًŒo—R‚µ‚ؤ‹ں‹‹پiژتگ^‚ج‰©گFٹغ‚ج‚ب‚©پA–îˆَ‚ھ‚ ‚é•û‚ھUSB‘¤پj

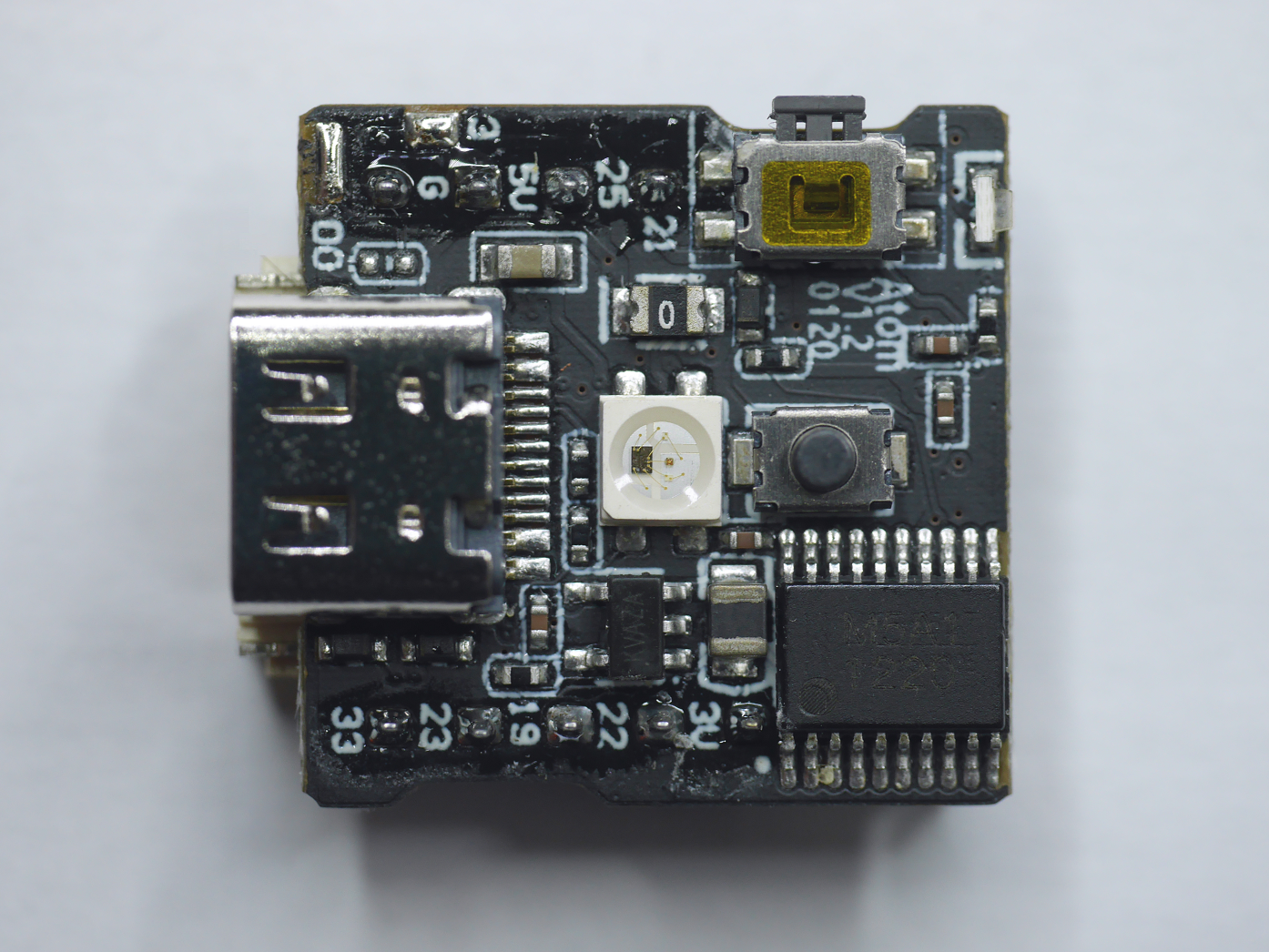
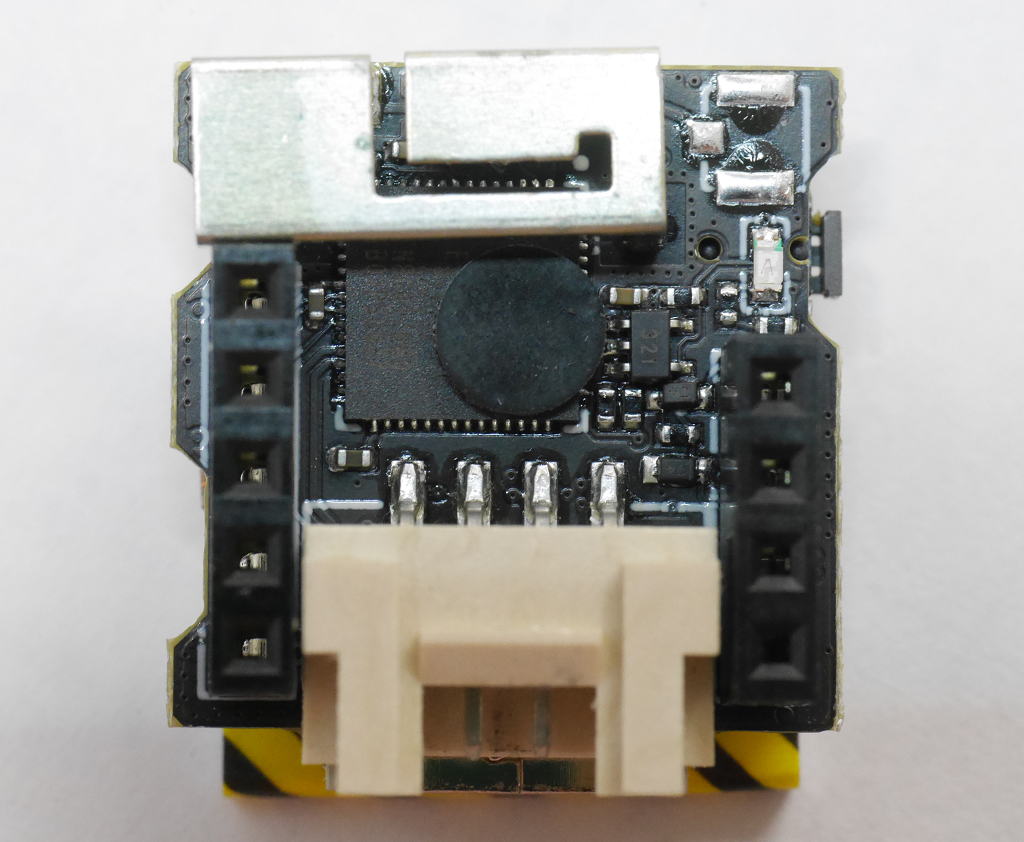
M5AtomƒVƒٹپ[ƒY‚جUSBƒVƒٹƒAƒ‹•دٹ·IC(M5ƒJƒXƒ^ƒ€) (2020/06/28-)
USBƒVƒٹƒAƒ‹•دٹ·IC(M5ƒJƒXƒ^ƒ€)‚جƒچƒbƒg‚ة‚و‚èƒfƒoƒCƒXƒhƒ‰ƒCƒo‚ج‹““®‚ھژلٹ±ˆظ‚ب‚è‚ـ‚·پB| ƒٹƒٹپ[ƒX | USBƒVƒٹƒAƒ‹•دٹ·IC | “ء’¥ |
| Light-? | M5-A 1955 | M5StickC 2019.10ƒٹƒٹپ[ƒXˆبچ~‚ئ“¯‚¶|
| Matrix-? | M5A1 0120 | M5-A 1955‚ئ“¯Œn“پH |
| Echo-? | M5A1 1220 | M5 1915‚ئ“¯Œn“پH |
- پ¦ USBƒVƒٹƒAƒ‹•دٹ·IC(M5ƒJƒXƒ^ƒ€)‚ج4Œ…•\‹L‚ح19/20‚ھ”NپA‚ج‚±‚è2Œ…‚ھڈT‚ًژ¦‚µ‚ؤ‚¢‚é‚ئژv‚ي‚ê‚ـ‚·پB
ch55x_esp - CH55xƒVƒٹپ[ƒYMCU‚ةٹî‚أ‚USB-ƒVƒٹƒAƒ‹ƒuƒٹƒbƒWپB
IC‚ً‚وپ[‚Œ©‚é‚ئM5‚ئƒŒپ[ƒUپ[چڈˆَ‚³‚ꂽ‰؛‚ة‚¤‚ء‚·‚ç‚ئ552T‚ج•¶ژڑ‚ھŒ©‚¦‚ـ‚·پB
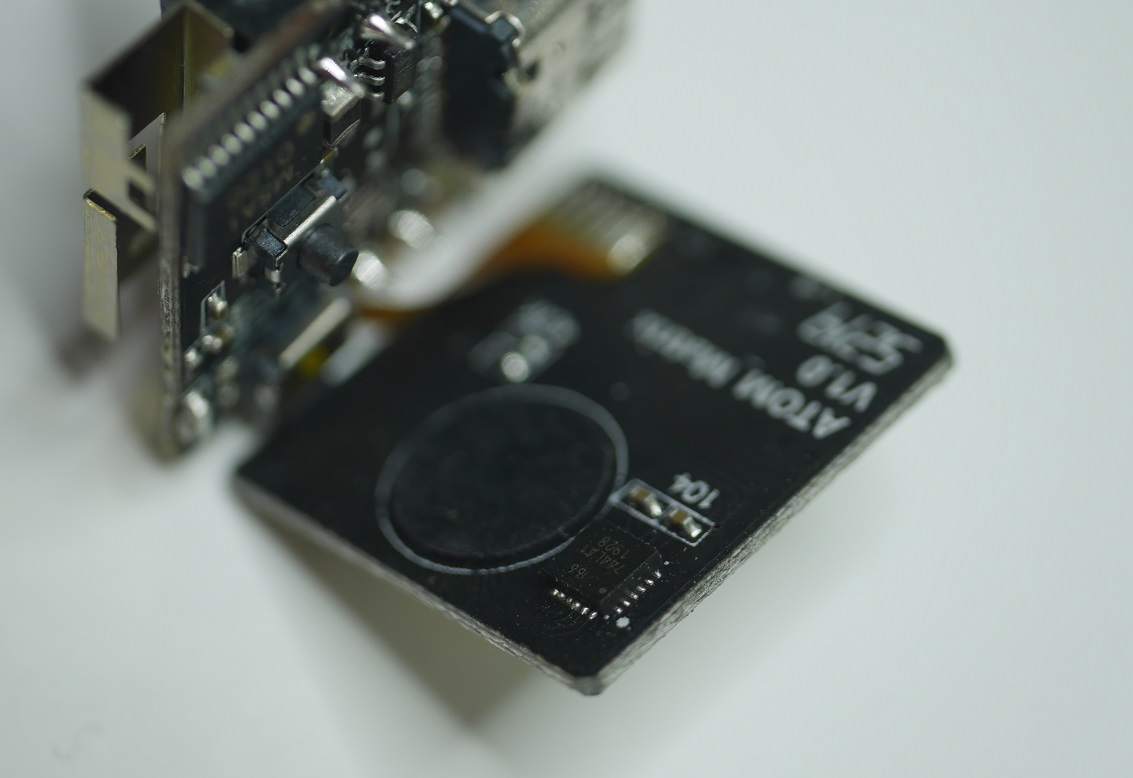
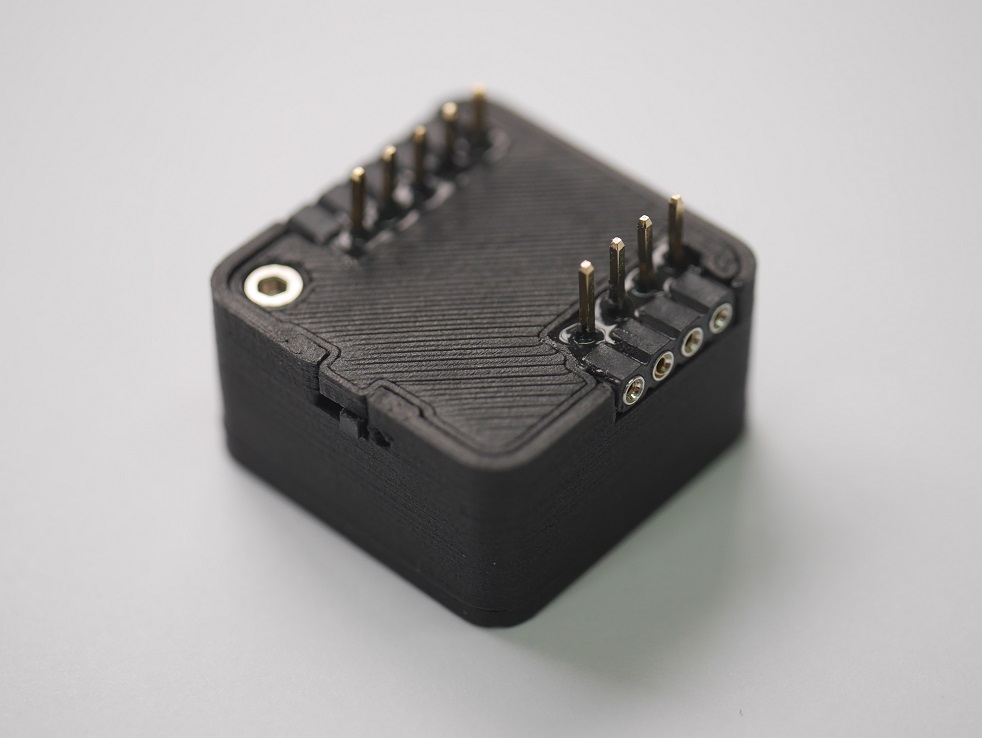
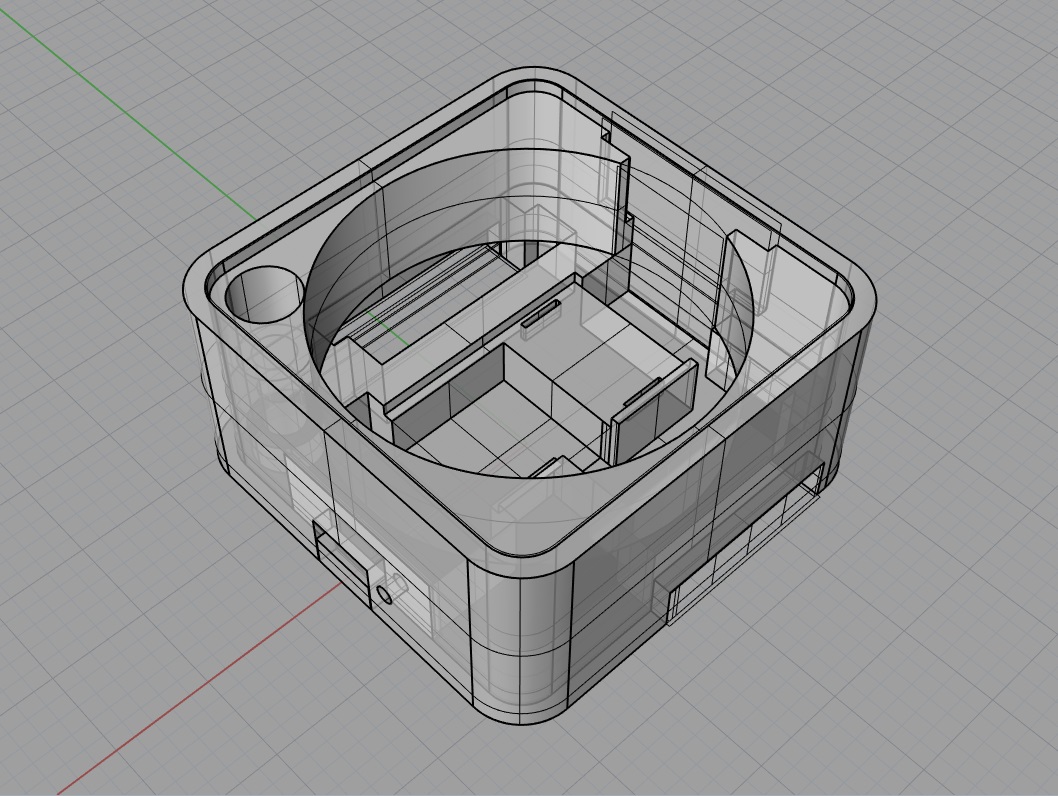
M5Atom‚جƒoƒbƒeƒٹپ[‚ًچى‚ء‚ؤ‚ف‚½ (2020/04/16-)Index
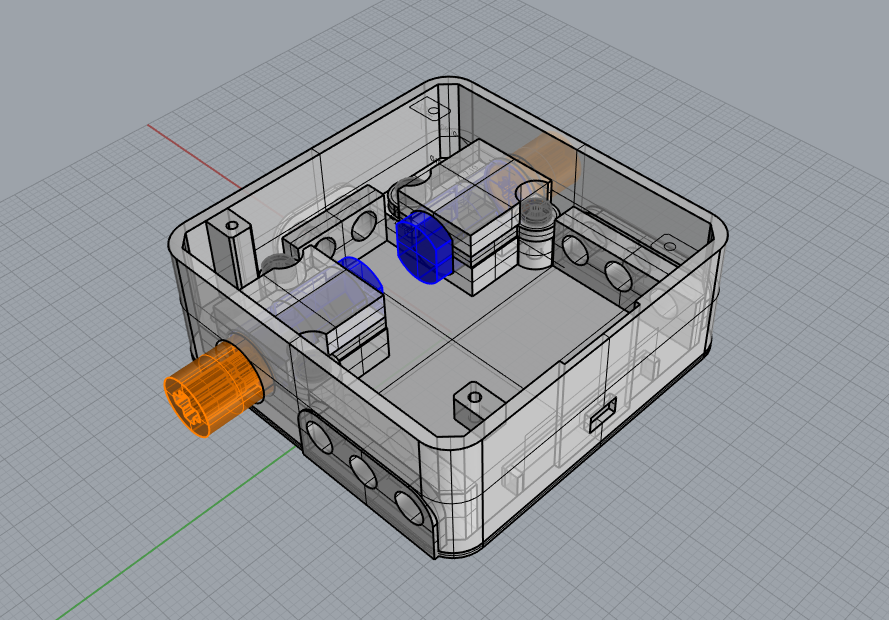
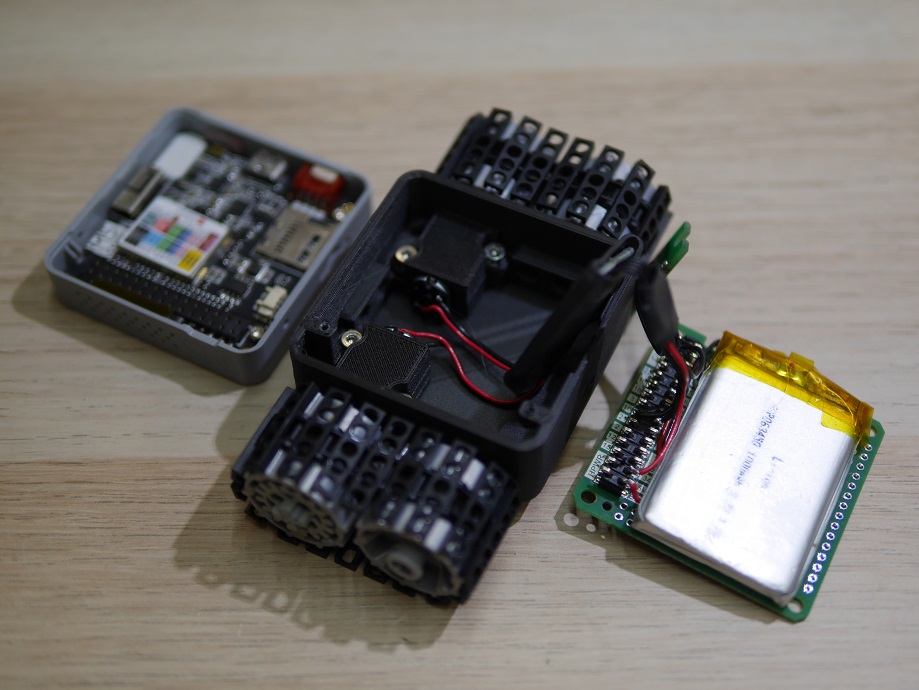
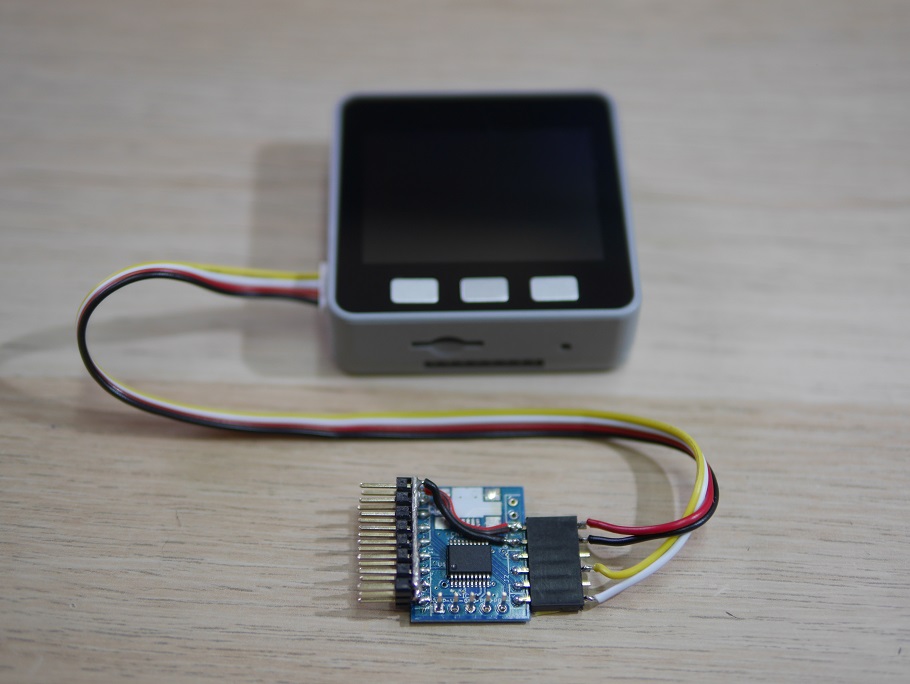
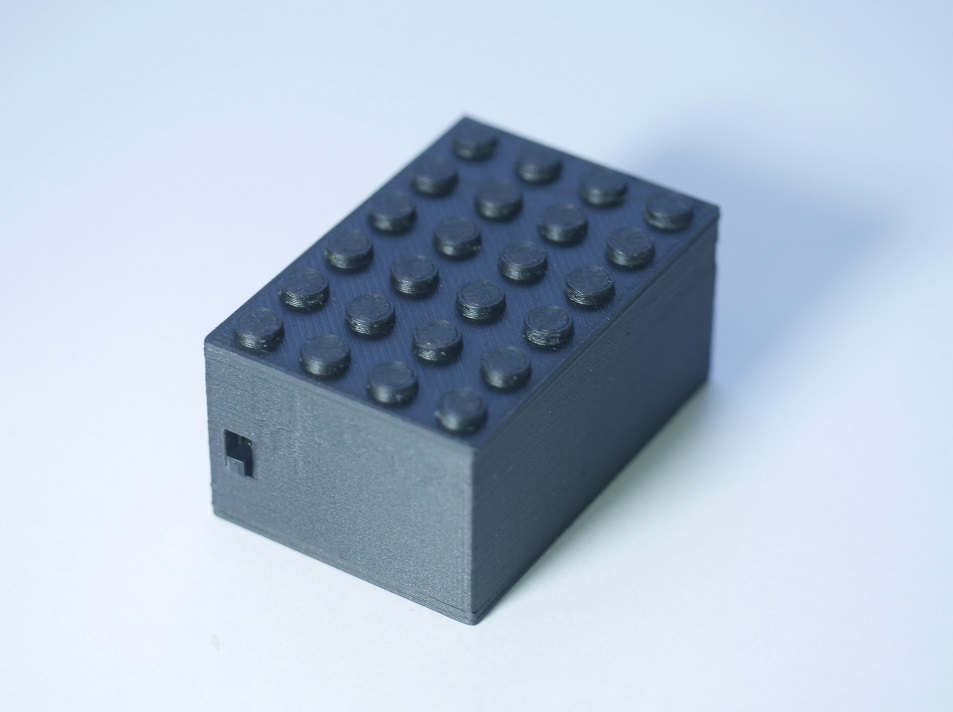
M5Atom‚ج“d’rƒ{ƒbƒNƒX (2020/04/16)
M5Atom‚ة‚ ‚ي‚¹‚ؤڈ¬‚³‚ب“d’rƒ{ƒbƒNƒX‚ًچى‚è‚ـ‚µ‚½پBON/OFF—p‚ج•¨—ƒXƒCƒbƒ`‚à‚آ‚¯‚ـ‚µ‚½پB”w–ت‚ج’[ژq‚حƒTƒCƒh‚©‚çڈo‚µ‚ؤ‚¢‚ـ‚·پB “dŒ¹ڈo—ح‚ح”w–ت‚ج5V’[ژq‚ةŒq‚ھ‚è‚ـ‚·پB
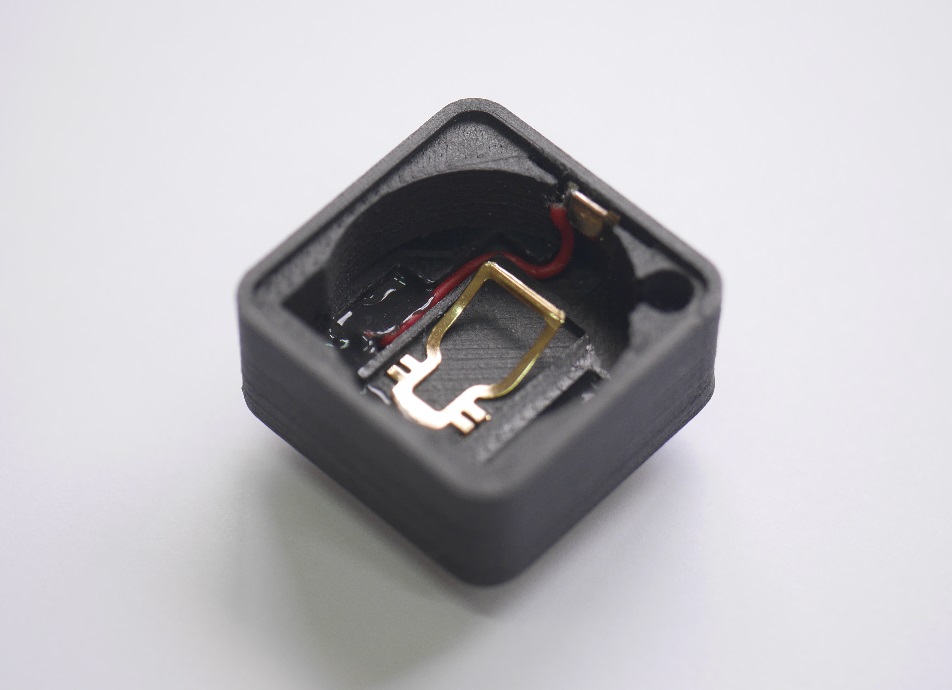
M5Atom‚ج“d’rƒ{ƒbƒNƒX (‚¨ژèŒy”إ) (2020/06/05)





‹¤—§ƒGƒŒƒVƒ‡ƒbƒv ƒXƒCƒbƒ`•tƒRƒCƒ““d’rƒPپ[ƒX 2032پ~2—p(چ•) CR2032-2 BK
‹¤—§ƒGƒŒƒVƒ‡ƒbƒv ƒRƒCƒ““d’rƒzƒ‹ƒ_ ƒXƒCƒbƒ`پ•ƒٹپ[ƒhگüƒ^ƒCƒv CR2032-1CL
‹ى“®ژٹش‚جƒ`ƒFƒbƒN


- پE CR2032(3.0V)پ~2(6V‚»‚ج‚ـ‚ـ)پF
- پE LIR2032(3.7V/45mAh/ڈ[“d‰آ”\/ڈ[“d‰آ”\)پF
گ”ڈ\•ھˆبڈم“®چىپAIO33‚إ“dˆ³ƒ`ƒFƒbƒN - پE LIR2032(3.7V/45mAh/ڈ[“d‰آ”\)پ~2 + ƒXƒeƒbƒvƒAƒbƒv/ƒ_ƒEƒ““dˆ³ƒŒƒMƒ…ƒŒپ[ƒ^(S9V11F5) ڈيژ5Vڈo—حپF
گ”ڈ\•ھˆبڈم“®چىپA’Zژٹش‚ب‚çڈ¬Œ^ƒTپ[ƒ{‚à‹ى“®‰آ”\پAIO33‚إ“dˆ³ƒ`ƒFƒbƒN
M5Atom Lite‚ة9ژ²ƒZƒ“ƒTپ[‚ً’ا‰ء‚µ‚ؤ‚ف‚½پB(2020/04/20)Index
M5Atom Lite‚ة9ژ²ƒZƒ“ƒT‚ً’ا‰ء‚µ‚ـ‚µ‚½پB‚؟‚ه‚ء‚ئƒPپ[ƒX‚ًچي‚ء‚½‚¯‚اٹïگص“I‚بƒ}ƒbƒ`ƒ“ƒOپI

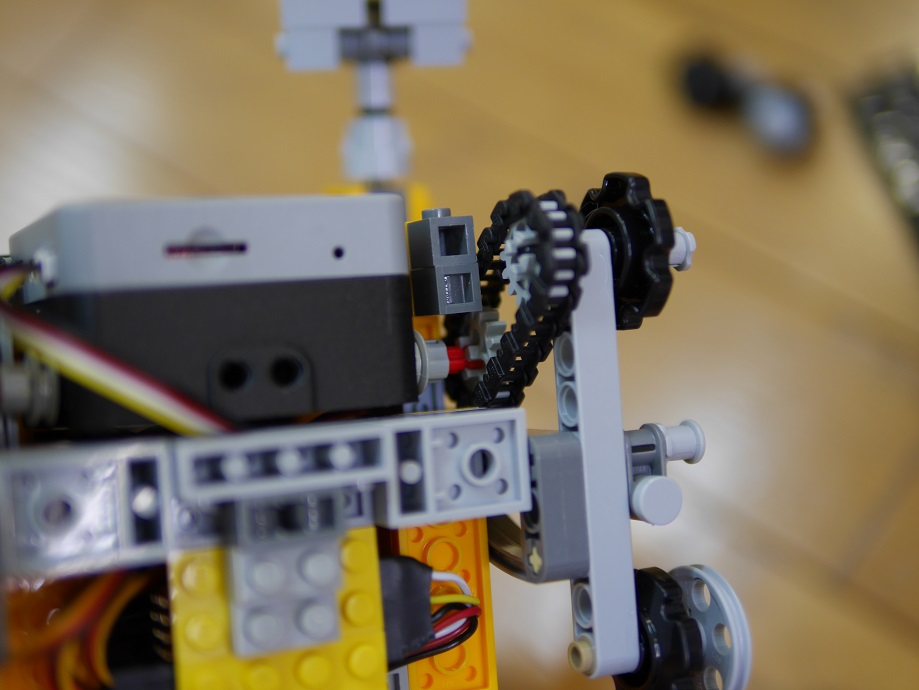
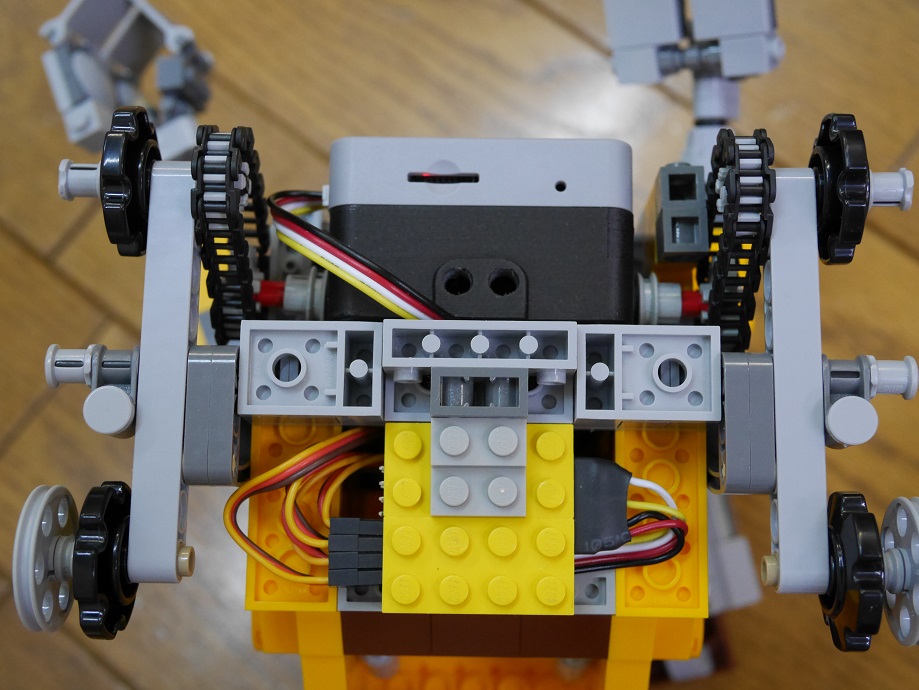
M5Atom‚جƒŒƒSƒ}ƒEƒ“ƒ^‚ًچى‚ء‚ؤ‚ف‚½پB(2020/04/22)Index
ƒoƒbƒeƒٹپ[‚ئƒTپ[ƒ{ƒhƒ‰ƒCƒo‚ً‘g‚فچ‡‚ي‚¹‚é‚ئƒŒƒSŒفٹ·‚إچإڈ¬ƒNƒ‰ƒX‚جƒVƒXƒeƒ€‚ھچى‚ê‚ـ‚·پI


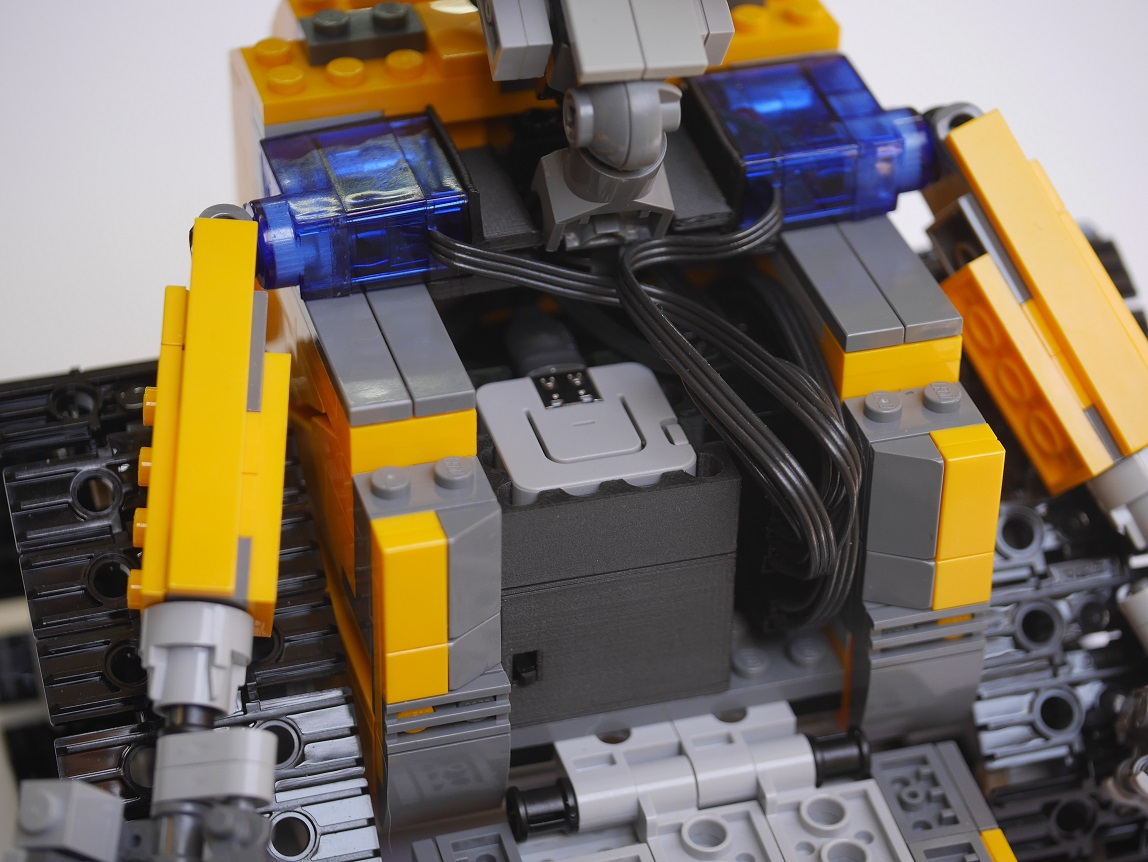
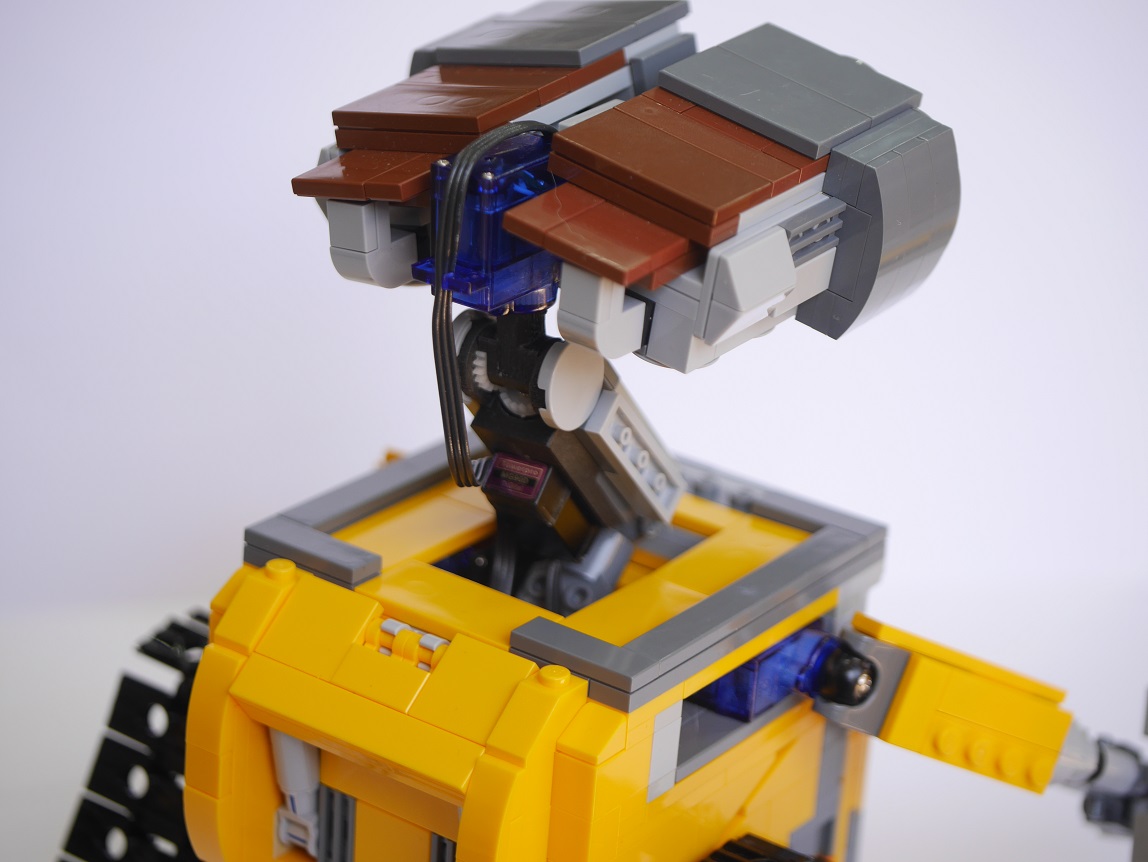
M5Atom WALL-Eٹ®گ¬‚µ‚ـ‚µ‚½پI(2020/04/23)Index
WALL-E LEGO(21303)‚جٹOٹد‚ً‚ظ‚ئ‚ٌ‚ا‚»‚ج‚ـ‚ـ‚ة‚µ‚ؤپAƒLƒƒƒ^ƒsƒ‰پAƒAپ[ƒ€پAƒwƒbƒhپiڈم‰؛چ¶‰Eپj‚ً“®‚‚و‚¤‚ة‚µ‚ـ‚µ‚½پIDUALSHOCK3‚إƒRƒ“ƒgƒچپ[ƒ‹‚µ‚ـ‚·پB



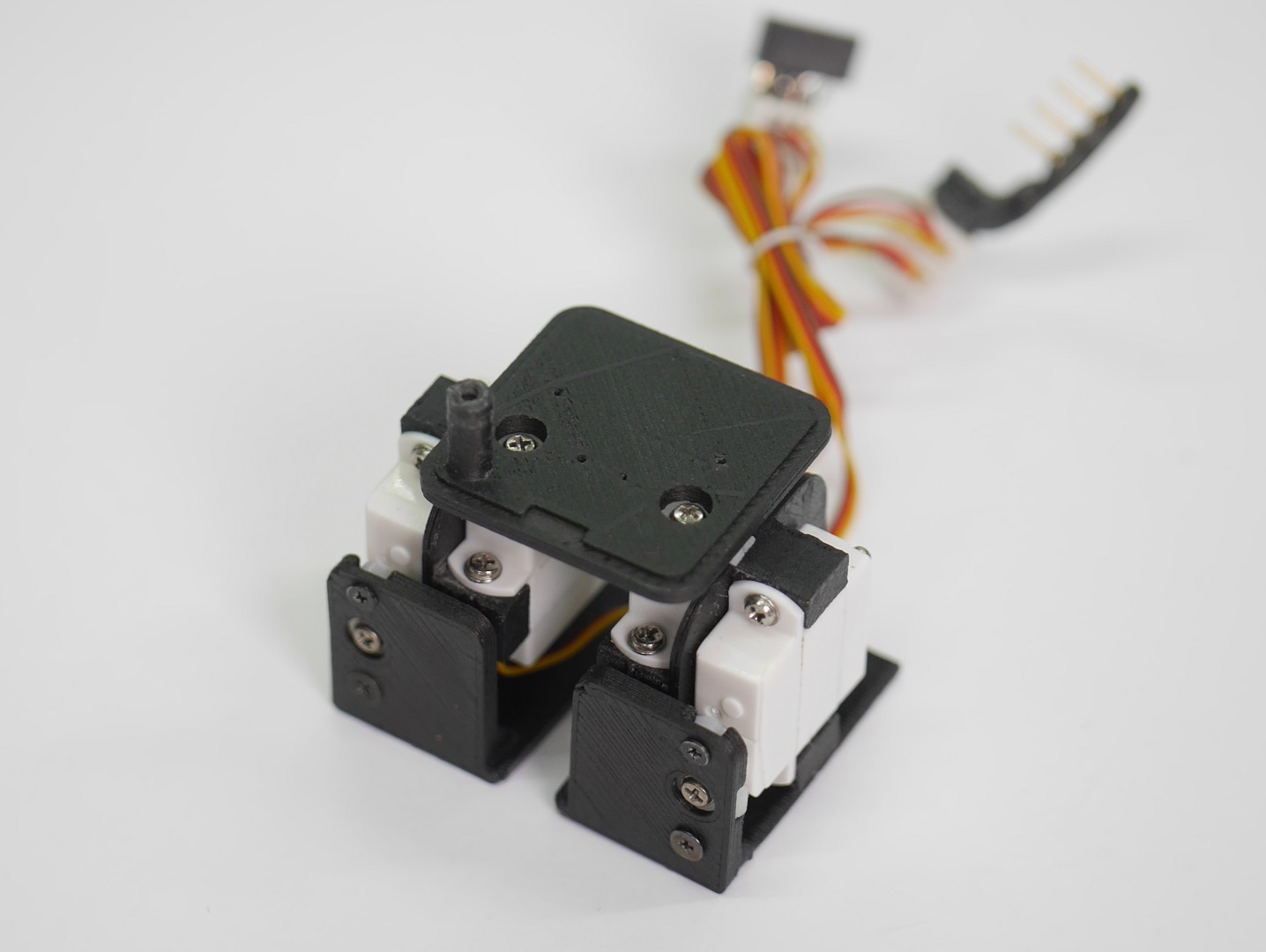
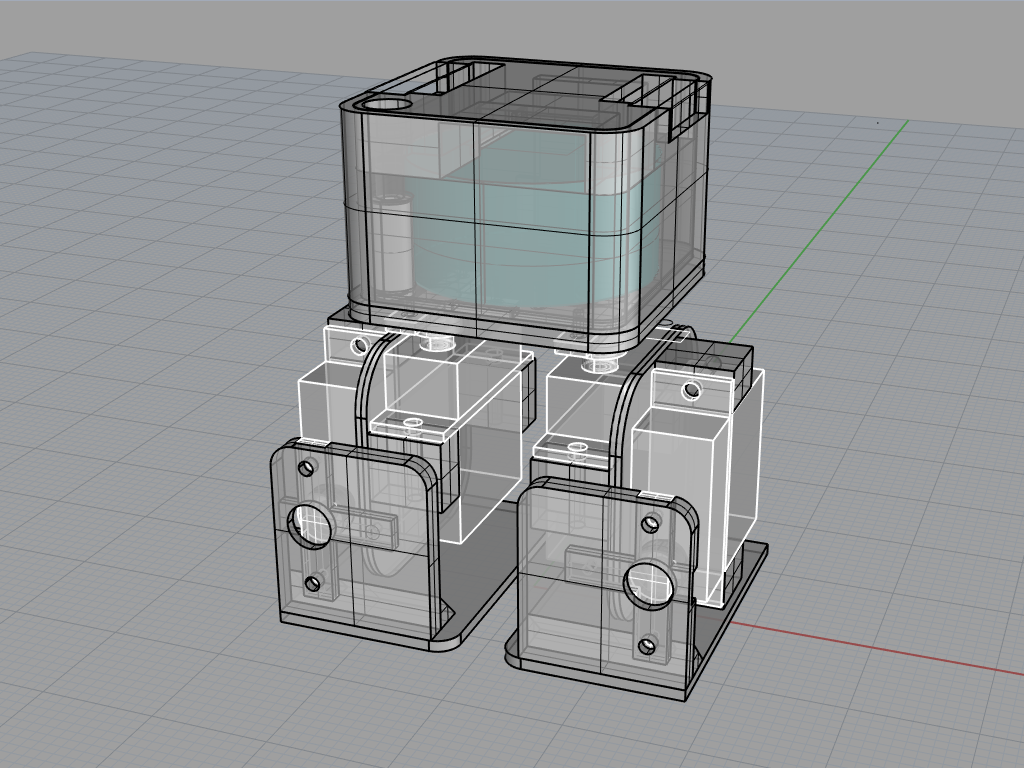
M5Atom 2‘«•àچsƒچƒ{ NanoWalker U800(2020/05/11-)Index
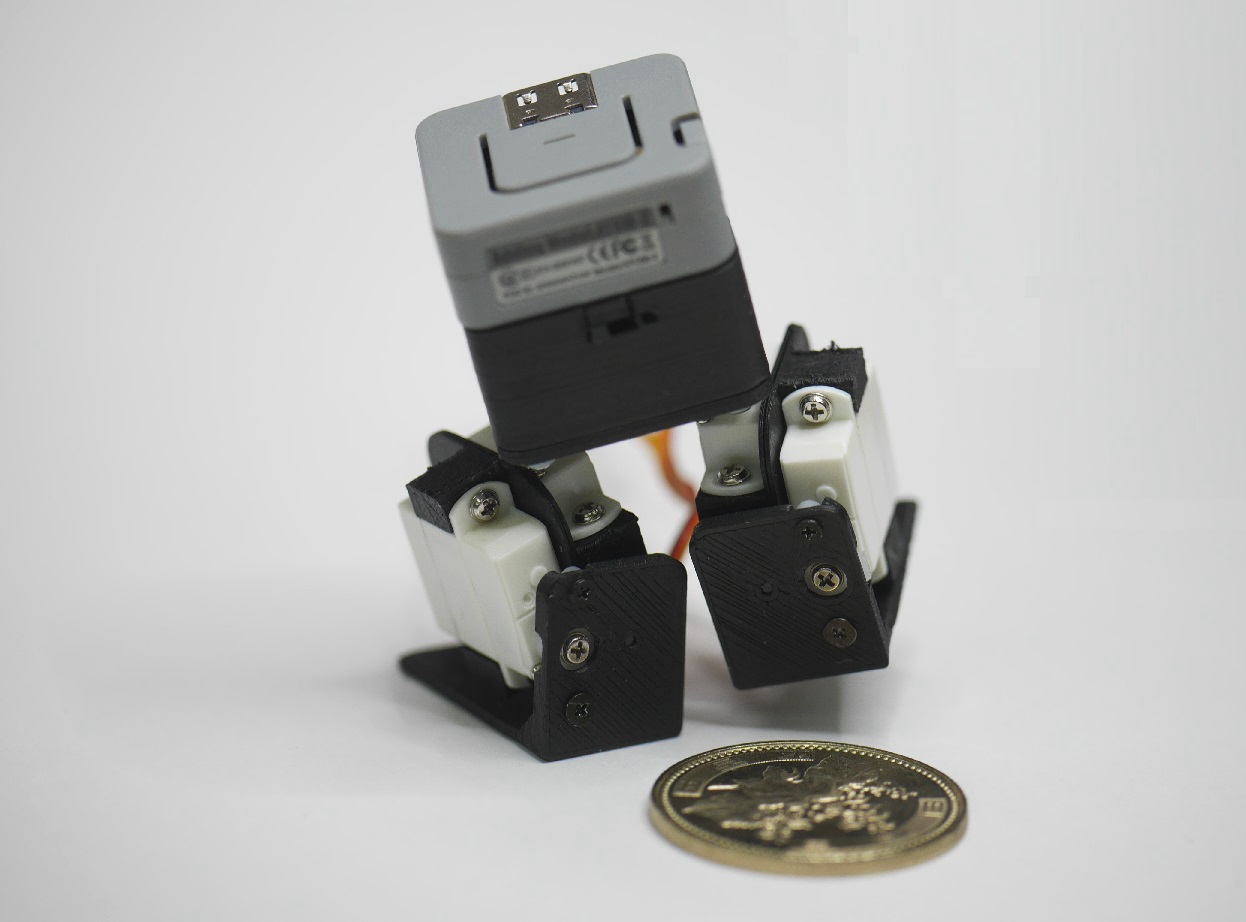
‚¢‚آ‚à‚ج‚و‚¤‚ةƒvƒŒƒXƒe3‚جƒRƒ“ƒgƒچپ[ƒ‰(DUALSHOCK3)‚إ‘€چى‚µ‚ـ‚·پB
ƒŒƒS‚جƒ~ƒjƒtƒBƒO‚ًڈو‚¹‚ؤ‚à‚؟‚ل‚ٌ‚ئ•à‚«‚ـ‚·پB(^_^)
ƒoƒbƒeƒٹپ[‚حLi-Po(200mAh)‚ة‚ب‚è‚ـ‚µ‚½پi•¨—ƒXƒCƒbƒ` & ‚»‚ج‚ـ‚ـڈ[“d‰آ”\‚إ‚·پj
ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚ً’کژز‚ة–³’f‚إ“]چع‚ ‚é‚¢‚حڈ¤‹ئ–ع“I‚إ—ک—p‚·‚邱‚ئ‚ً‹ضژ~‚µ‚ـ‚·پB ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚جƒAƒCƒfƒA‚ً—¬—p‚µ‚½چى•iپA‚¨‚و‚رŒِٹJ‚µ‚ؤ‚¢‚é“ئژ©‚ج‰ًگحŒ‹‰ت‚ًٹـ‚قڈî•ٌ‚ًپASNSپAƒuƒچƒOپAڈ‘گذ‚ب‚ا‚إ”•\‚·‚éچغ‚ح‚²ˆê•ٌ‚‚¾‚³‚¢پB‚±‚؟‚ç‚جƒTƒCƒg‚ض‚جƒٹƒtƒ@ƒŒƒ“ƒX(ƒٹƒ“ƒN)‚ً‰ء‚¦‚ؤ‚‚¾‚³‚¢پB





WALL-E‚ئ‹¤‰‰ (^_^) (2020/05/25)
چ،ڈT‚جƒrƒbƒNƒٹƒhƒbƒLƒٹƒپƒJ ”گiپIM5Atom Echo‚إƒTƒEƒ“ƒhƒGƒtƒFƒNƒg‚ھڈo‚é‚و‚¤‚ة‚µ‚ـ‚µ‚½پB(2020/06/10)
M5Stack Japan Creativity Contest 2020‚إNanoWalker U800‚ھ“üڈـ‚µ‚ـ‚µ‚½پI (2020/10/03)
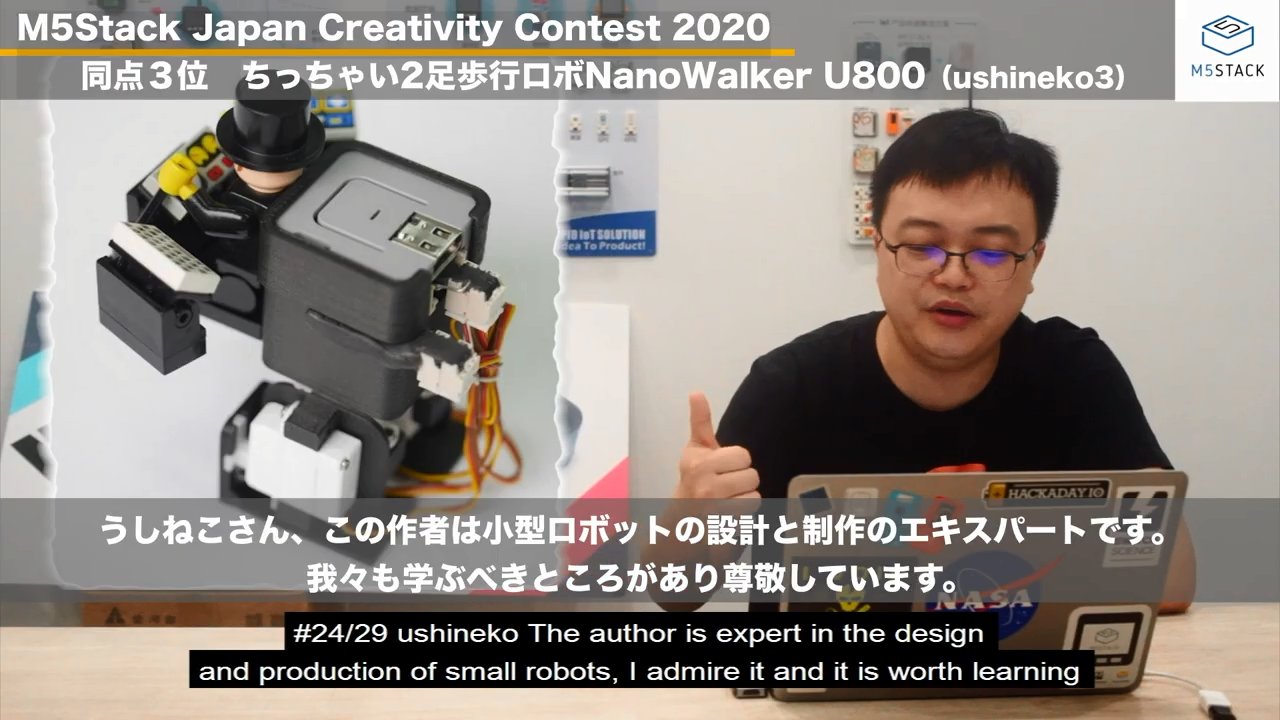
Jimmyژذ’·‚©‚çپu‚±‚جچىژز‚حڈ¬Œ^ƒچƒ{ƒbƒgگفŒv‚ئگ§چى‚جƒGƒLƒXƒpپ[ƒg‚إ‚·پB‰نپX‚àٹw‚ش‚ׂ«‚ئ‚±‚ë‚ھ‚ ‚葸Œh‚µ‚ؤ‚¢‚ـ‚·پBپv‚ئƒRƒپƒ“ƒg‚ً’¸‚«‚ـ‚µ‚½پB
گg‚ة—]‚éŒُ‰hپAٹً‚µ‚¢‚إ‚·پI‚ ‚è‚ھ‚ئ‚¤‚²‚´‚¢‚ـ‚·پI
M5Stack Japan Creativity Contest 2020 “üڈـ”•\ !
NanoWalker U800‚ةڈو‚ء‚½ƒŒƒS‚جƒ~ƒjƒtƒBƒO‚ةƒ‰ƒCƒgƒZپ[ƒoپ[‚ًگU‰ٌ‚³‚¹‚ؤ‚ف‚ـ‚µ‚½پB (2021/1/21)
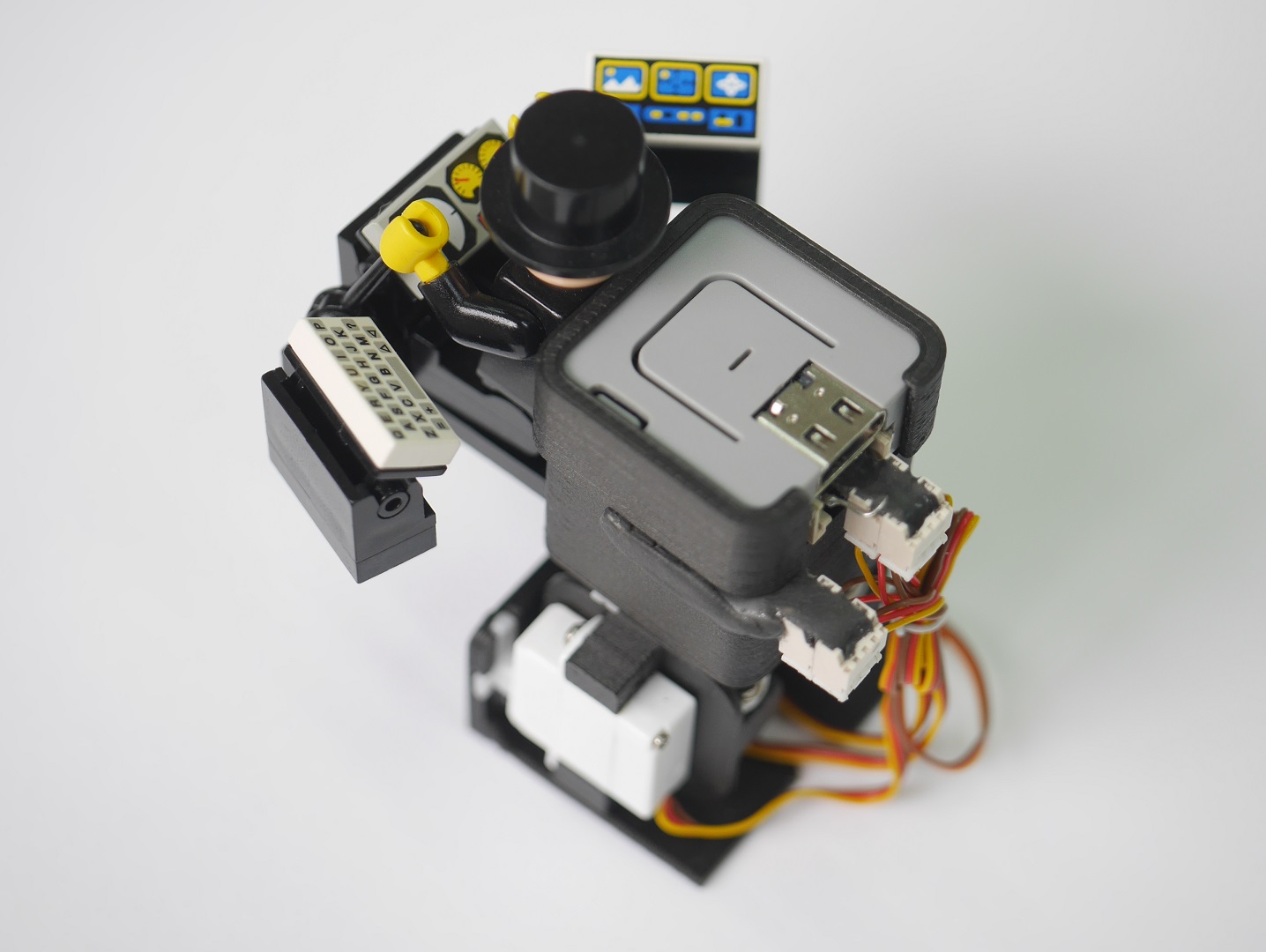
M5Atom‚إƒvƒbƒVƒ…ƒtƒHƒ“Œ^ƒLپ[ƒ{پ[ƒh‚ًچى‚ء‚ؤ‚ف‚½ (2020/07/21)Index
ƒvƒbƒVƒ…ƒtƒHƒ“‚جƒپƒJ‚ً‚»‚ج‚ـ‚ـژg—p‚µ‚ؤBluetoothƒLپ[ƒ{پ[ƒh‚ة‚µ‚ـ‚µ‚½پB‰ù‚©‚µ‚جƒvƒbƒVƒ…ƒzƒ“‚جٹ´ٹo‚ًٹy‚µ‚ك‚ـ‚·پB
ڈ¬Œ^ƒoƒbƒeƒٹپ[“‹چعپB(Atom‚ج‰؛‚جچ•‚¢” )

ƒvƒچƒOƒ‰ƒ€‚ج‰ًگàپ¨ MicroPython•زپuMicroPython‚إBluetooth‚ًژg‚¤پv
M5Atom‚إƒTپ[ƒ}ƒ‹ƒvƒٹƒ“ƒ^‚ةˆَچü‚µ‚ؤ‚ف‚½ (2021/12/01)Index
M5Atom‚ةڈ¬Œ^‚جƒTپ[ƒ}ƒ‹ƒvƒٹƒ“ƒ^‚ًŒq‚¢‚إٹا—گl‚³‚ٌ‚ً[چ‚‘¬]ڈo—ح‚µ‚ؤ‚ف‚ـ‚µ‚½پB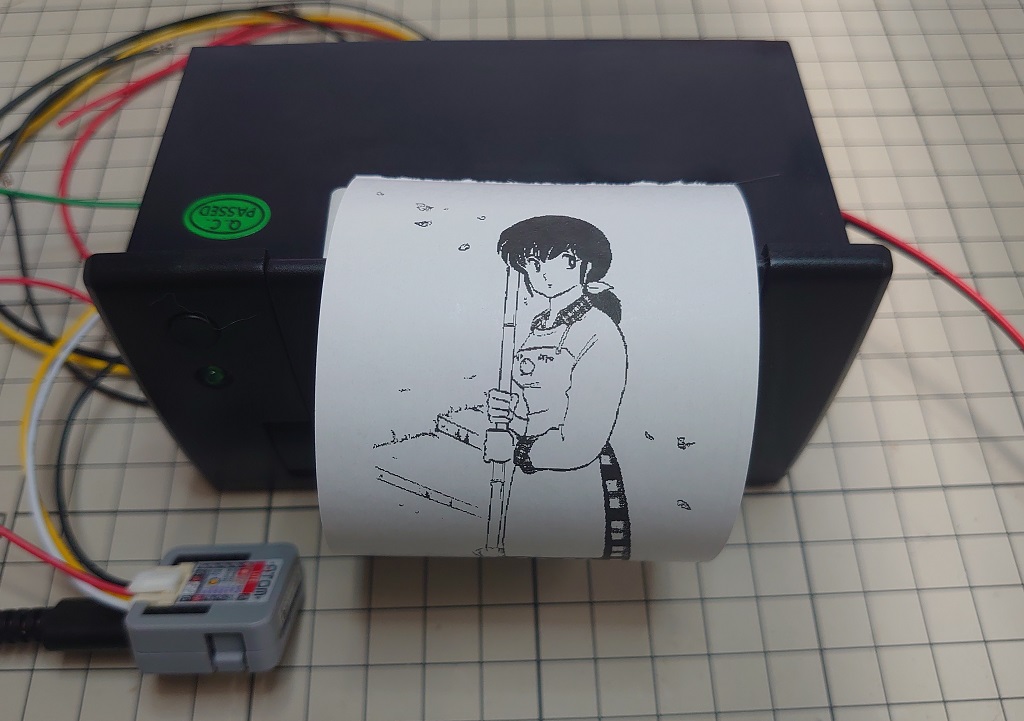
M5Atom‚إƒLƒrƒLƒr“®‚NanoRolling‚ًچى‚ء‚ؤ‚ف‚½پB (2021/02/07-)Index
ƒ‚پ[ƒ^پ[ژ²‚إ‚»‚ج‚ـ‚ـ‹ى“®‚µ‚ؤ‚¢‚ـ‚·پB‚¨گK‚جƒچƒbƒh‚إژpگ¨‚ً•د‚¦‚邱‚ئ‚ھڈo—ˆ‚ـ‚·پB
ƒIƒvƒVƒ‡ƒ“‚جLEGOƒXƒvƒٹƒ“ƒOƒVƒ…پ[ƒ^پ[[15301]‚ً‘•”ُ‚µ‚ؤ”ژث‰آ”\پI
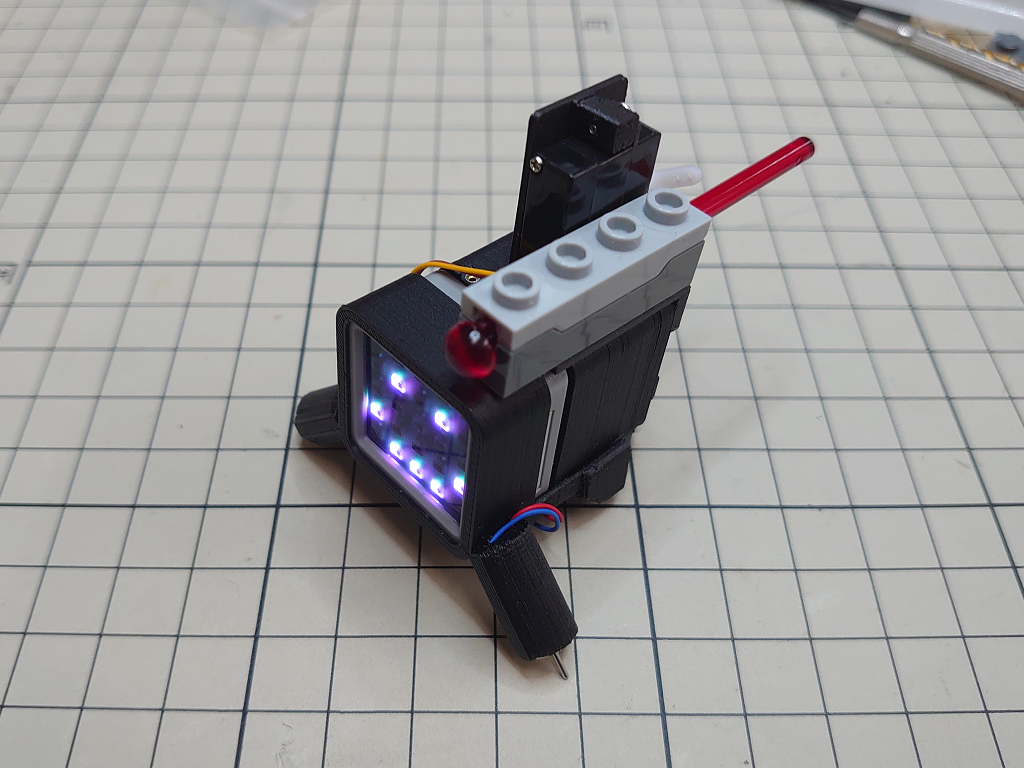
M5Atom‚إƒ~ƒjƒtƒBƒO‚ً“®‚©‚µ‚ؤ‚ف‚½پB (2021/02/07-)Index
“ھپA—¼ژèپA‘«پiƒcƒCƒXƒg‚ج‚فپj‚ھ“®‚«‚ـ‚·پB ڈ¬‚³‚¢‚ج‚إƒپƒJ‚ج‘g‚فچ‚ف‚ة‹êکJ‚µ‚ـ‚µ‚½پB
M5AtomS3‚ج‰ًگحIndex
- پE M5AtomS3‚حM5Atom‚جCPU‚ج‹‰»”إ ESP32S3پ©ESP32پiƒJƒ^ƒچƒOƒXƒyƒbƒN‚¾‚ئ–ٌ20%‚جŒüڈمپj
- پE M5AtomS3‚حƒJƒ‰پ[LCD(GC9107) ‚ئIMU(MPU6886)‚ًژہ‘•‚µ‚ؤ‚¢‚ـ‚·پBپiM5AtomS3 Lite‚ح–¢“‹چعپj

M5AtomS3”إ‚ةNanoRolling‚ًƒoپ[ƒWƒ‡ƒ“ƒAƒbƒv‚µ‚ؤ‚ف‚½پB (2023/04/12)Index
NanoRolling‚ًM5AtomS3‚ة‘خ‰‚µ‚ـ‚µ‚½پBESP32S3‚حBluetooth Classic‚ة‘خ‰‚µ‚ؤ‚¢‚ب‚¢‚ج‚إDUALSHOCK3‚ھژg‚¦‚ب‚¢‚½‚كپAWi-Fi‰»‚µ‚½DUALSHOCK2‚ًژg‚ء‚ؤƒRƒ“ƒgƒچپ[ƒ‹‚µ‚ؤ‚¢‚ـ‚·پB



M5Stack Japan Creativity Contest 2023‚إNanoRolling‚ھ“üڈـ‚µ‚ـ‚µ‚½پI (2023/10/11)

Jimmyژذ’·‚©‚çپuژہ‘H—ح‚ئگفŒv—ح‚ھ”ٌڈي‚ة—D‚ê‚ؤ‚¢‚ـ‚·پv‚ئƒRƒپƒ“ƒg‚ً’¸‚«‚ـ‚µ‚½پB
‚ئ‚ء‚ؤ‚àŒُ‰h‚إٹً‚µ‚¢‚إ‚·پI‚ ‚è‚ھ‚ئ‚¤‚²‚´‚¢‚ـ‚·پI
M5AtomƒVƒٹپ[ƒY—p‚جƒ~ƒjƒtƒBƒOƒAƒ_ƒvƒ^ (2023/05/6-)Index
M5AtomƒVƒٹپ[ƒY—p‚جƒ~ƒjƒtƒBƒOƒAƒ_ƒvƒ^‚ًچى‚è‚ـ‚µ‚½پIAtomS3‚ة‰ًگحŒ‹‰ت‚©‚ç”»’f‚µ‚ؤLIR2032(3.7V/45mAh/ڈ[“d‰آ”\)پ~2’¼—ٌ‚ً5V’[ژq‚ة’¼Œ‹‚µ‚ؤ‚¢‚ـ‚·پB(”ٌگ„ڈ§‚إ‚·)
M5Stamp
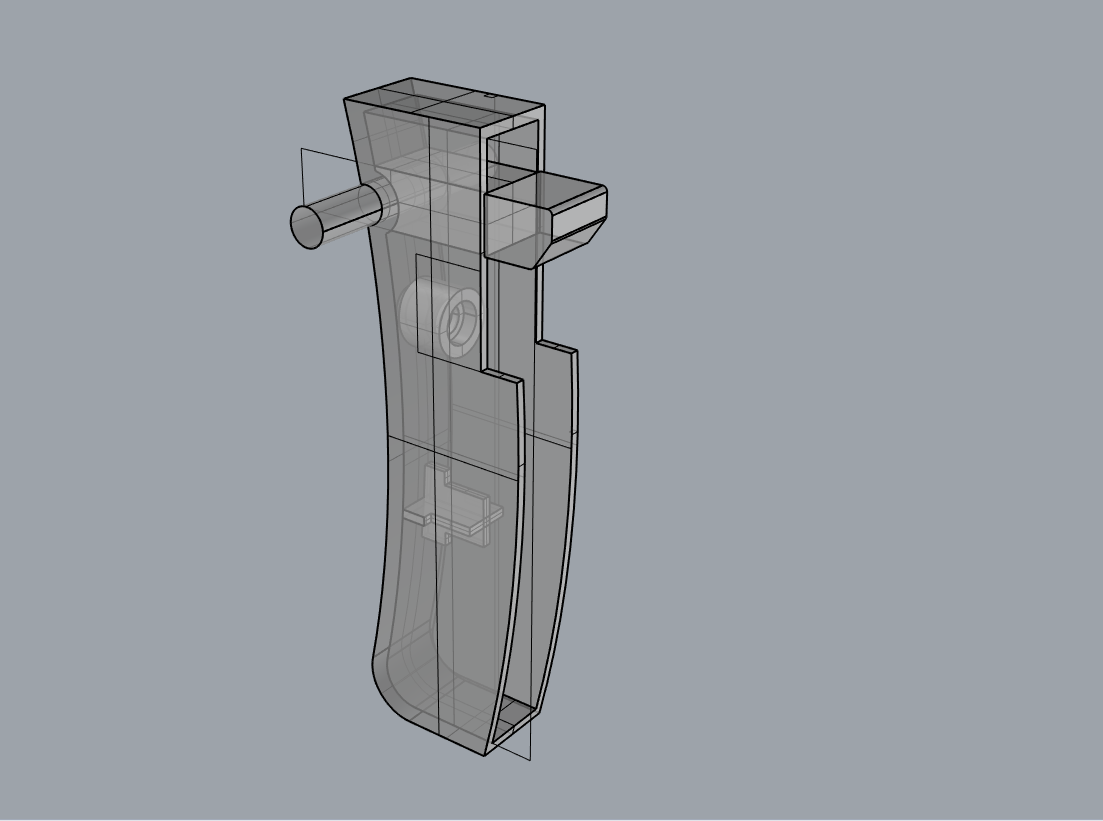
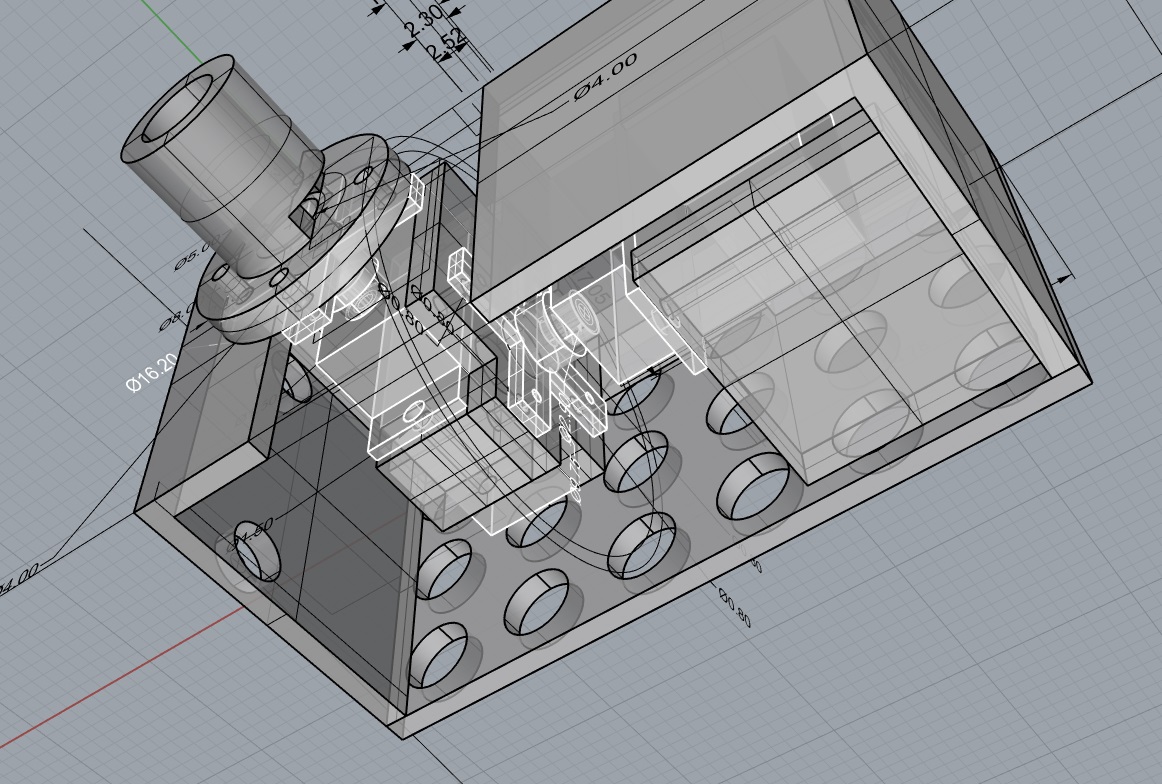
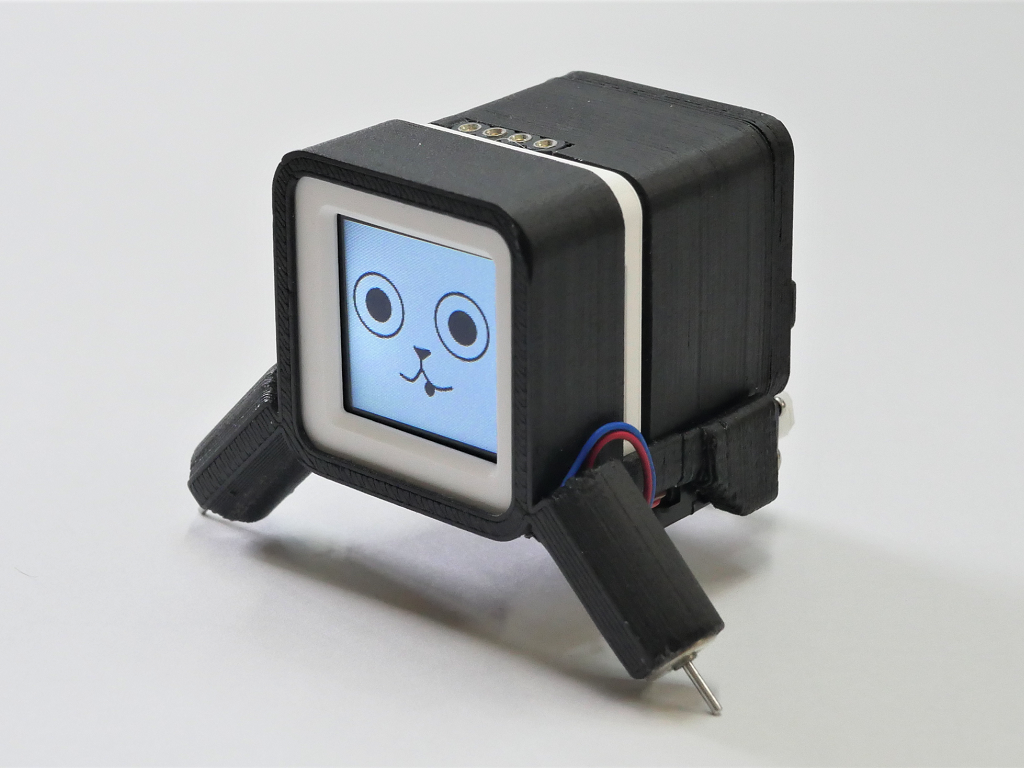
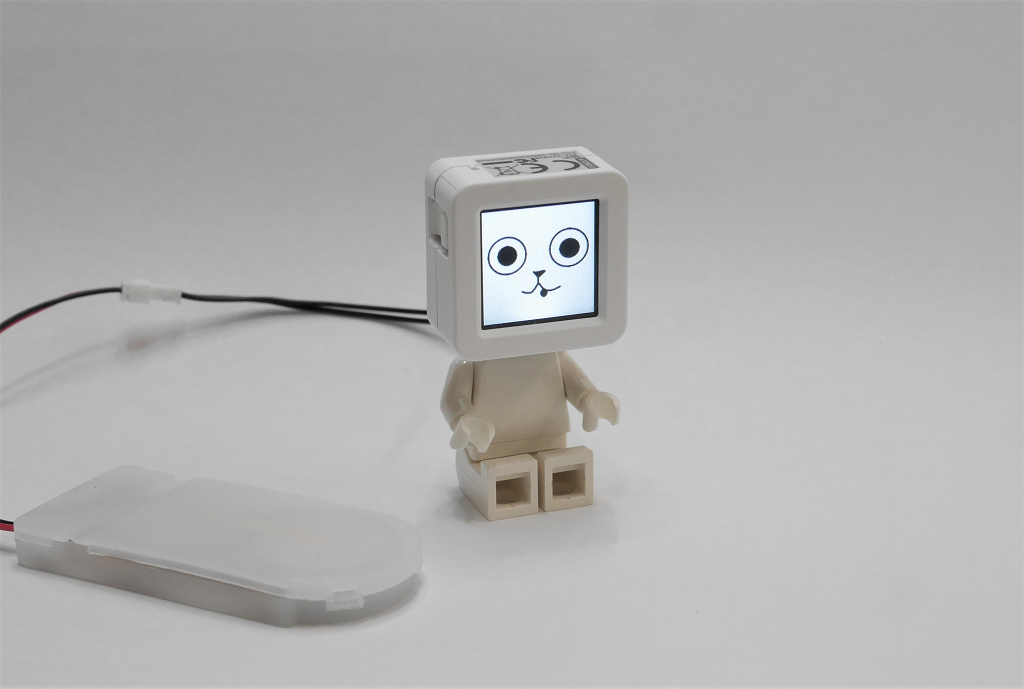
M5Stamp‚إچإڈ¬‹‰NanoTank‚ًچى‚ء‚ؤ‚ف‚½پB (2022/02/07-)Index
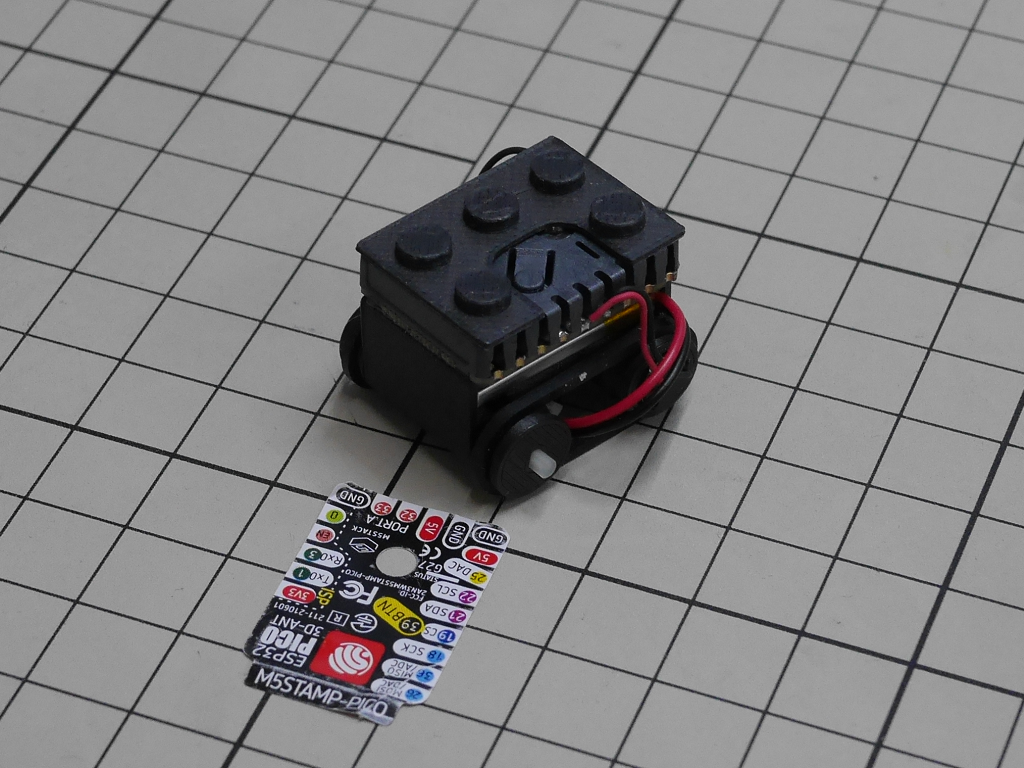
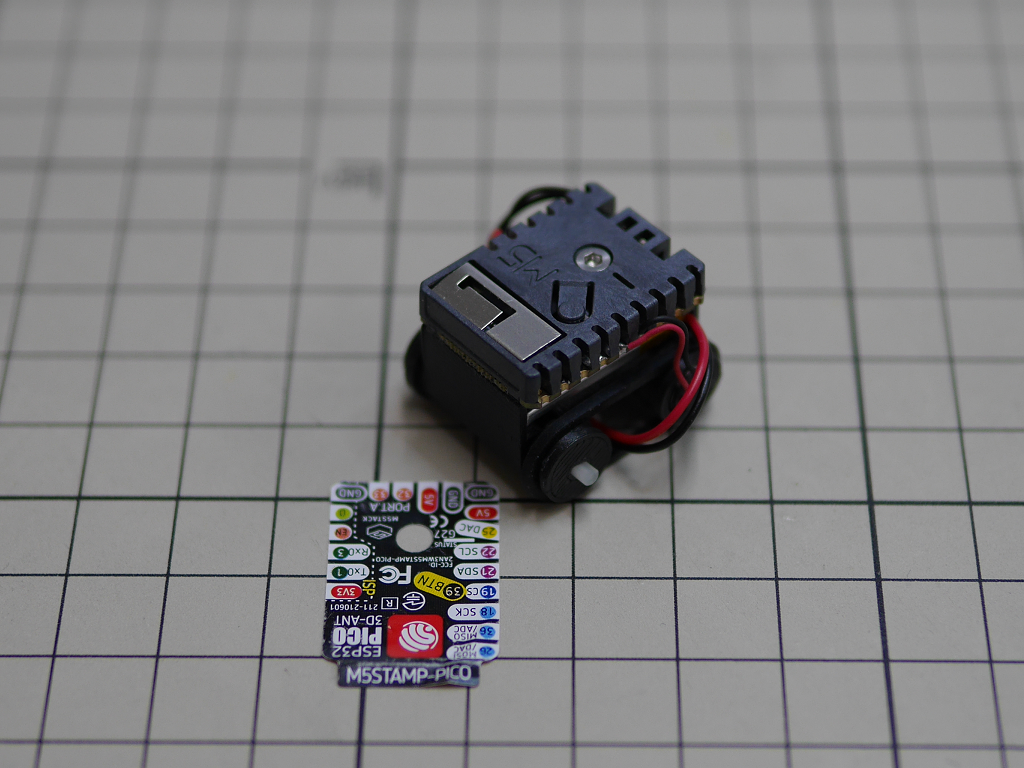
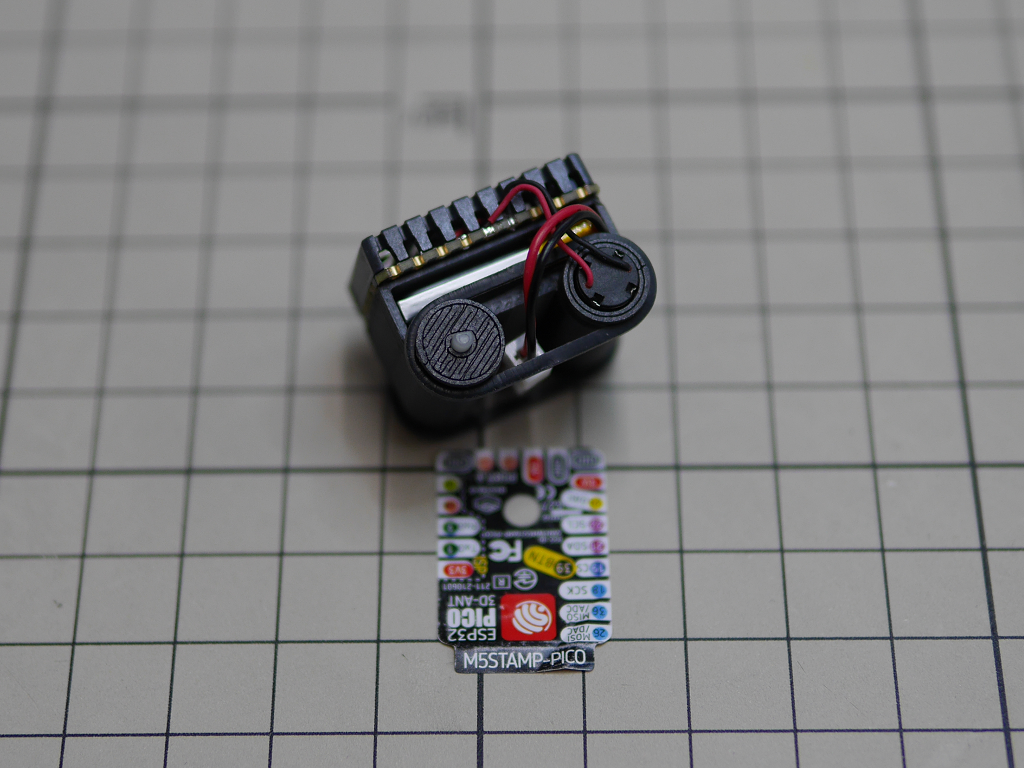
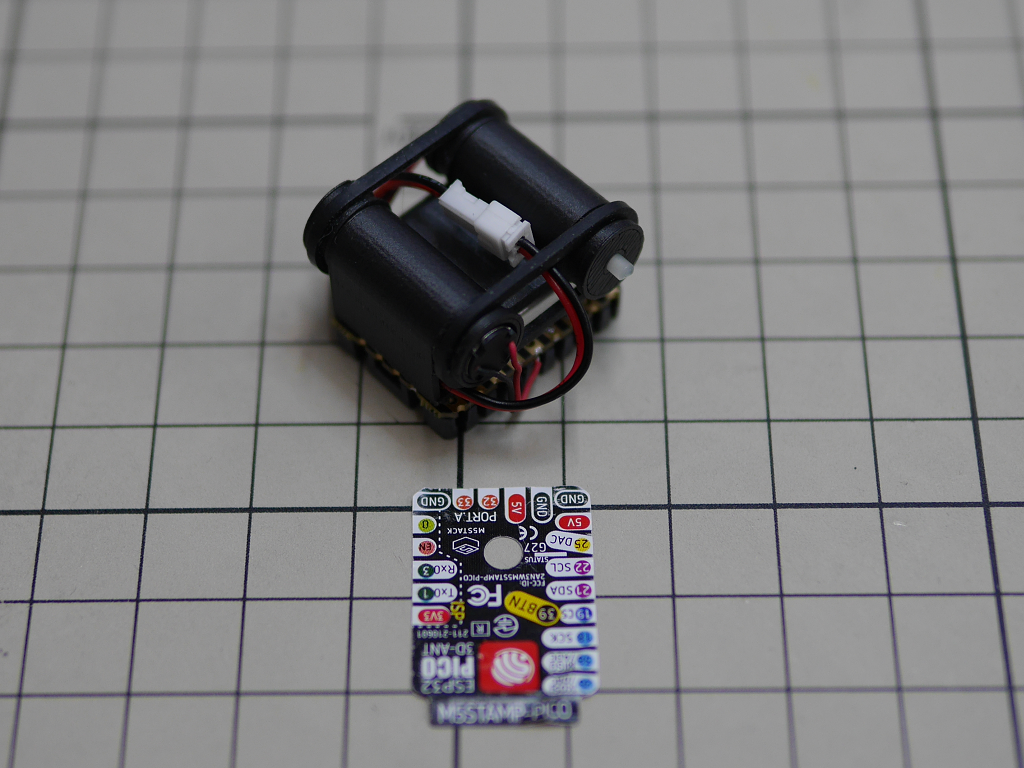
M5Stamp Pico
6mmƒMƒ„پ[ƒhƒ‚پ[ƒ^پ[گ¸–§ƒ~ƒjƒ}ƒCƒNƒچ—Vگ¯Œ¸‘¬‹@ƒMƒAƒ‚پ[ƒ^پ[DC3V(4ƒXƒeپ[ƒW)
ƒtƒ@ƒ“ƒ‹پ[ƒ€ ƒVƒٹƒRƒ“ƒoƒ“ƒh’PگF ƒuƒ‰ƒbƒN
Li-po 401422(4.0x14x22mm) 95mAh (M5StickC‚©‚çژو‚èٹO‚µ‚½ƒoƒbƒeƒٹپ[)
STLƒfپ[ƒ^
NanoTank STLƒfپ[ƒ^
ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚ً’کژز‚ة–³’f‚إ“]چع‚ ‚é‚¢‚حڈ¤‹ئ–ع“I‚إ—ک—p‚·‚邱‚ئ‚ً‹ضژ~‚µ‚ـ‚·پB ŒِٹJ‚µ‚ؤ‚¢‚é“à—e‚جƒAƒCƒfƒA‚ً—¬—p‚µ‚½چى•iپA‚¨‚و‚رŒِٹJ‚µ‚ؤ‚¢‚é“ئژ©‚ج‰ًگحŒ‹‰ت‚ًٹـ‚قڈî•ٌ‚ًپASNSپAƒuƒچƒOپAڈ‘گذ‚ب‚ا‚إ”•\‚·‚éچغ‚ح‚²ˆê•ٌ‚‚¾‚³‚¢پB‚±‚؟‚ç‚جƒTƒCƒg‚ض‚جƒٹƒtƒ@ƒŒƒ“ƒX(ƒٹƒ“ƒN)‚ً‰ء‚¦‚ؤ‚‚¾‚³‚¢پB
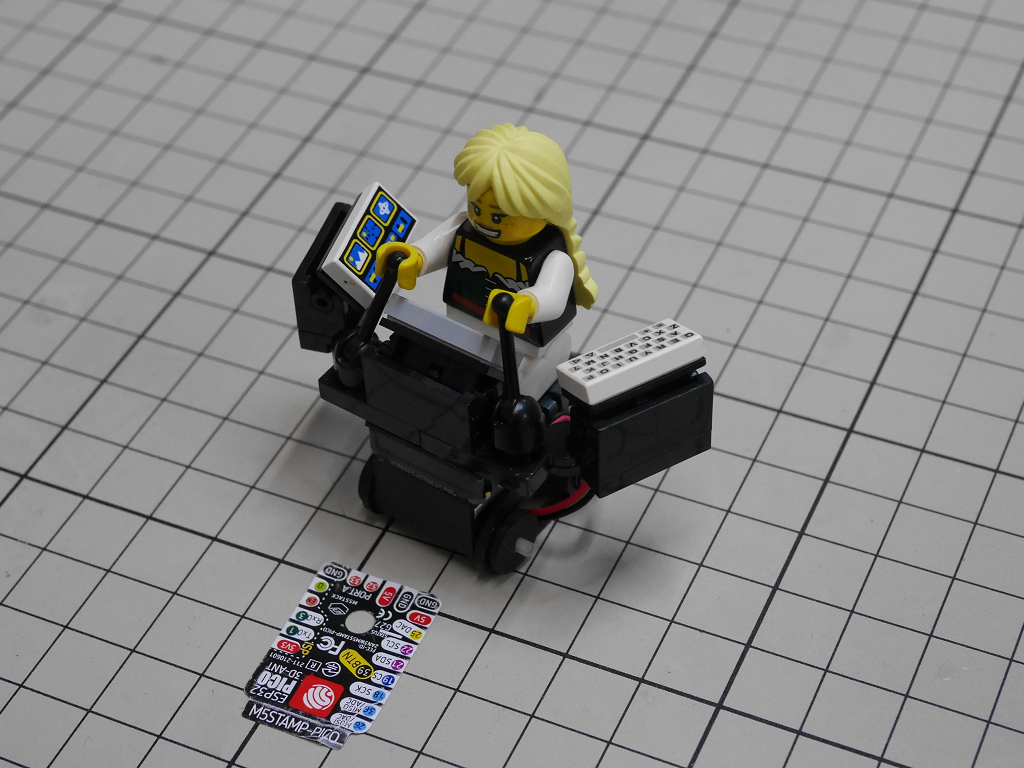
NanoTank‚إƒ‰ƒCƒ“ƒgƒŒپ[ƒX‚µ‚ؤ‚ف‚ـ‚µ‚½پB (2023/5/-)
TechGlassTube‚ًچى‚ء‚ؤ‚ف‚½پB (2022/02/09-)Index
چىگ¬’†پcƒKƒ‰ƒX•r‚ج‚ب‚©‚ةM5Stamp‚ح‚»‚ج‚ـ‚ـ“ü‚è‚ـ‚·پB

M5Stackپiژ„گفپjƒTƒ|پ[ƒgƒZƒ“ƒ^پ[
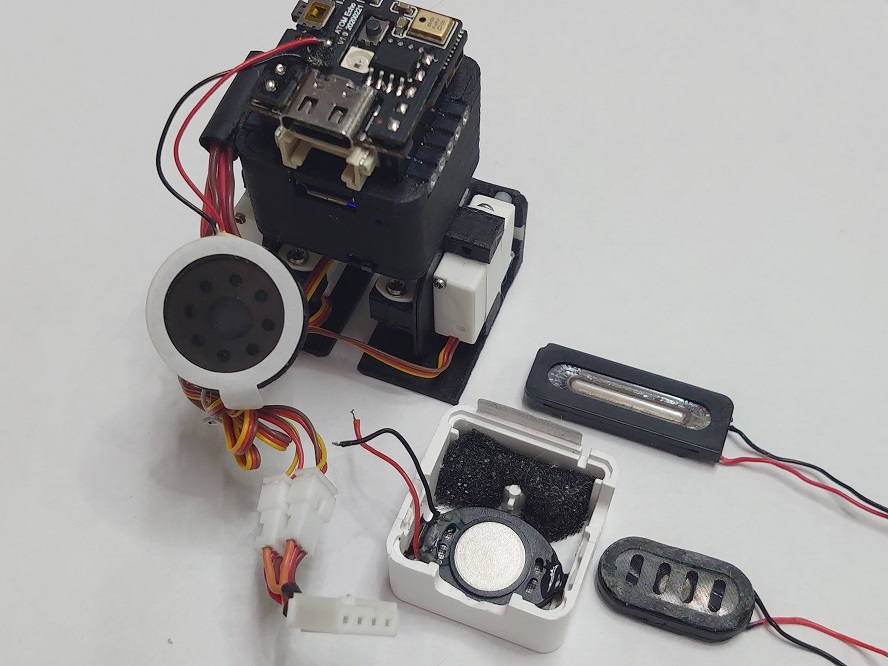
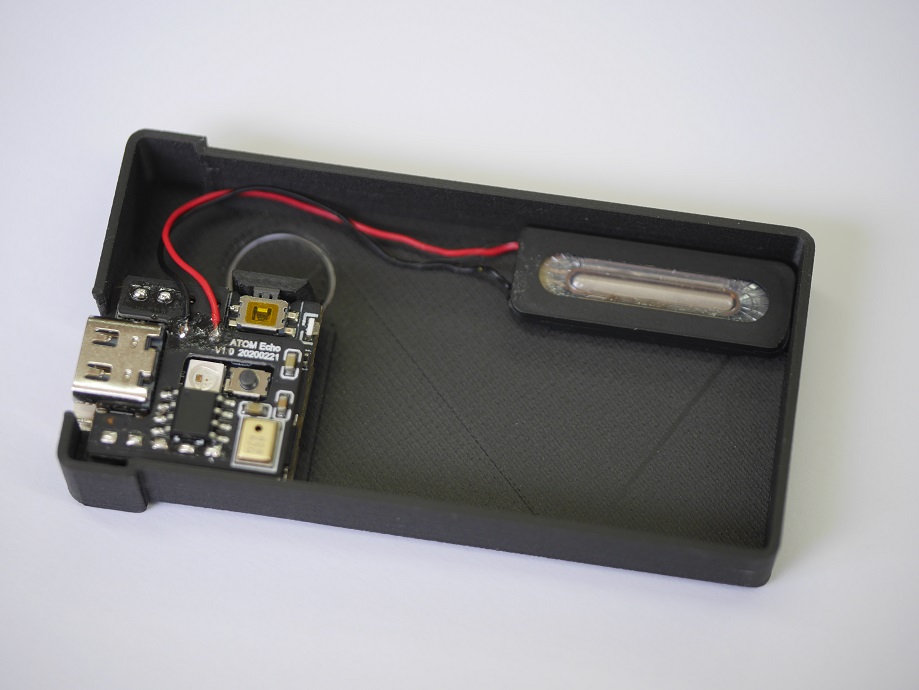
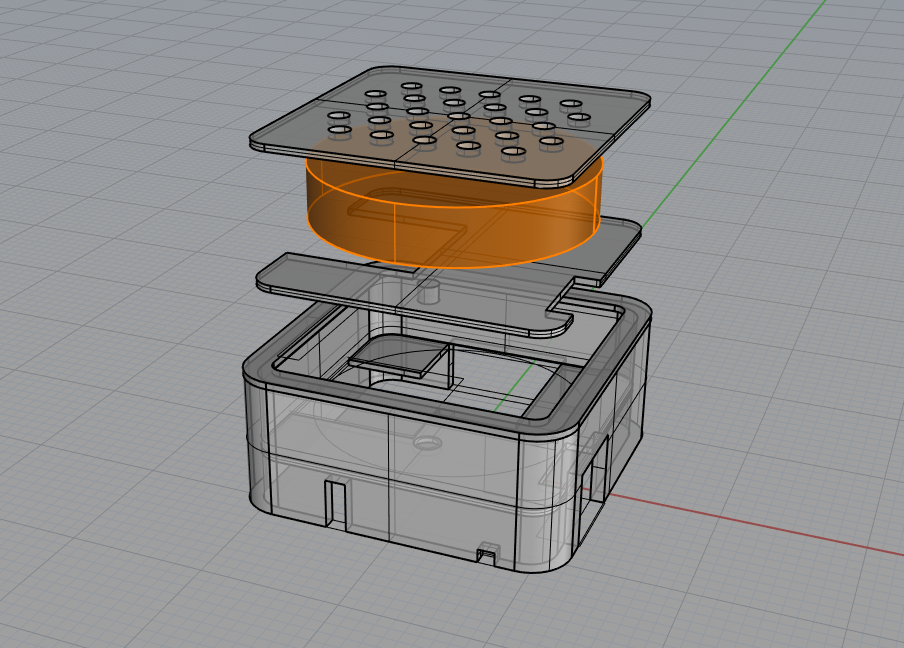
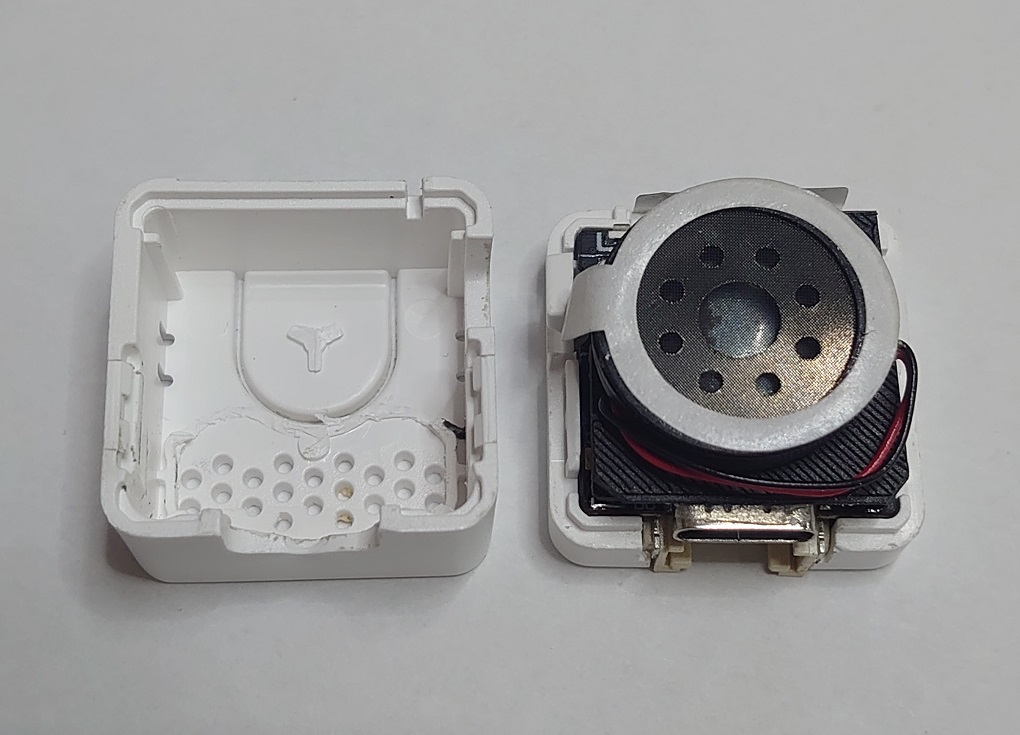
M5Atom Echo ƒXƒsپ[ƒJپ[‚ج•غŒى‘خچô (2020/06/9-)Index
M5Atom Echo‚حڈ¬‚³‚¢â‘ج‚ةƒXƒsپ[ƒJپ[‚ئƒ}ƒCƒN‚ھ“ü‚ء‚½ƒXƒ}پ[ƒgƒXƒsپ[ƒJپ[Œü‚¯‚جƒ‚ƒWƒ…پ[ƒ‹Œ»چفƒXƒsپ[ƒJپ[‚ج’èٹi“ü—ح‚ھƒAƒ“ƒvڈo—ح‚و‚è’ل‚¢‚½‚كƒXƒsپ[ƒJپ[‚ھ—ٍ‰»/”j‘¹‚·‚é–â‘è‚ھ”گ¶‚µ‚ؤ‚¢‚ـ‚·پB
ƒXƒsپ[ƒJپ[‚ھ”j‘¹‚µ‚ؤƒVƒ‡پ[ƒgڈَ‘ش‚ة‚ب‚ء‚ؤ‚µ‚ـ‚¤‚ئپAƒPپ[ƒX‚ھ•دŒ`‚·‚é‚ظ‚ا‚جچ‚”M‚ئ‚ب‚è‚ئ‚ؤ‚àٹ댯‚إ‚·پB
- پ¦ esptoolژg—pژ‚ح—v’چˆسپI
‘خچô1 : M5Atom Echo‚ةڈo—ح‚·‚éƒfپ[ƒ^‚ًƒvƒچƒOƒ‰ƒ€‚إ’²گ®‚·‚é
ƒvƒچƒOƒ‰ƒ€‚إڈo—حƒfپ[ƒ^‚ً’²گ®‚µ‚ـ‚·پB56%ˆب“à‚ةژû‚ك‚ê‚خ‰َ‚ê‚邱‚ئ‚ح‚ ‚è‚ـ‚¹‚ٌپB- پ¦ ƒvƒچƒOƒ‰ƒ€‚ج•s‹ïچ‡‚ب‚ا‚ة‚و‚è‘z’èٹO‚ج“®چى‚ً‚µ‚½‚ئ‚«‚ةƒXƒsپ[ƒJپ[‚ھ‰َ‚ê‚é‰آ”\گ«‚ھ‚ ‚邽‚كٹ®‘S‚ب‘خچô‚إ‚ح‚ ‚è‚ـ‚¹‚ٌپB
‘خچô2 : M5Atom Echo‚ة‹ں‹‹‚·‚é“dˆ³‚ً‰؛‚°‚é (2020/06/13)
NS4168‚ج“®چى“dˆ³‚ح3.0Vپ`5.5V‚إ‚·پBEcho“à•”‚إ‚ح5V’[ژq‚ةگع‘±‚³‚ê‚ؤ‚¢‚é‚ج‚إ5V’[ژq(”w–ت‚à‚µ‚‚حGrove/USB)‚ض‚ج‹ں‹‹“dˆ³‚ً3.8V’ِ“x‚ة‰؛‚°‚邱‚ئ‚إƒXƒsپ[ƒJپ[‚ج’èٹi“ü—ح‚ةچ‡‚¹‚ـ‚·پB–{‘ج‰ü‘¢‚ً‚µ‚ب‚¢‚إ‘خ‰‚إ‚«‚ـ‚·پBپiPCگع‘±ژ‚ة‚حUSB‚©‚ç5V‚ھ‹ں‹‹‚³‚ê‚é‚ج‚إ’چˆس‚ھ•K—vپj
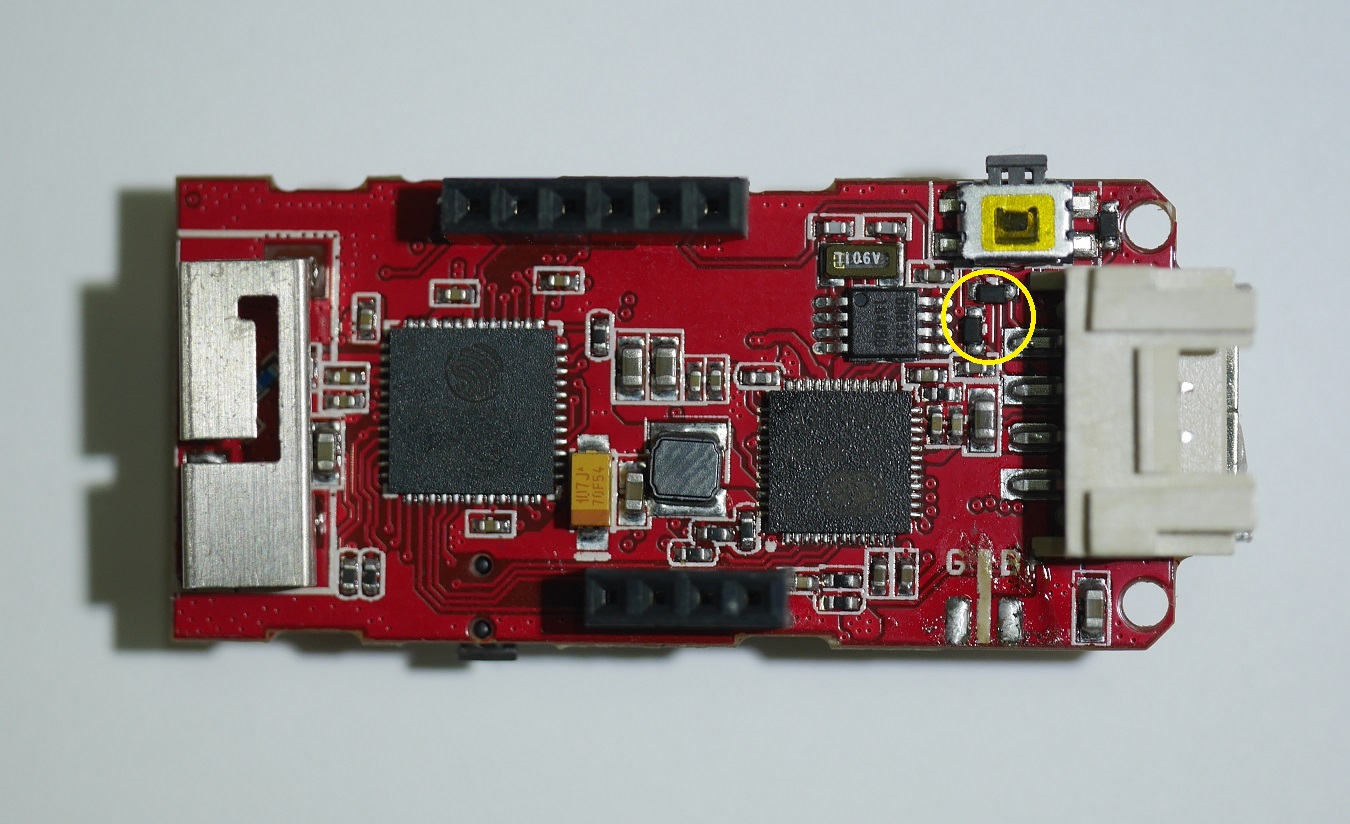
‘خچô3 : M5Atom Echo“à•”‚جNS4168‚ة‹ں‹‹‚·‚é“dˆ³‚ً3.3V‚ة‰؛‚°‚é (2020/06/13)
NS4168‚ج6”شƒsƒ“‚ج‘«‚ً‚ ‚°‚ؤ3.3V‚ةŒq‚¬‚ـ‚·پB‚±‚ê‚إƒXƒsپ[ƒJپ[‚ج’èٹi‚ةژû‚ـ‚è‚ـ‚·پB
‘خچô4 : ƒXƒsپ[ƒJپ[‚ًŒًٹ·‚·‚é (2020/06/10-)
NS4168‚ج’èٹiڈo—حˆبڈم‚جƒXƒsپ[ƒJپ[‚ةŒًٹ·‚µ‚ـ‚·پBŒًٹ·‰آ”\‚بƒXƒsپ[ƒJپ[‚جژd—l‚ح8ƒ¶1.25wˆبڈم‚ئ‚ب‚è‚ـ‚·پBŒ³‚جƒXƒsپ[ƒJپ[‚جژd—l‚ح8ƒ¶0.7w(20mmپ~10mm)‚إ‚·پB(Œِژ®ƒAƒiƒEƒ“ƒX)- پ¦ aitendo‚ة20mmپ~10mmˆب‰؛‚جƒTƒCƒY‚جƒXƒsپ[ƒJپ[‚ھ‚ ‚è‚ـ‚·پB‹–‰آ“ü—حپi’تڈي1W / ڈuٹش1.5Wپj‚ج‚à‚ج‚µ‚©‚ ‚è‚ـ‚¹‚ٌ‚ھ‚±‚جƒTƒCƒY‚إ‚حژd•û‚ ‚è‚ـ‚¹‚ٌپBژہچغ‚جژg—p‚إ‚ح–â‘è‚ب‚¢‚ئژv‚ي‚ê‚ـ‚·پB
M5AtomƒVƒٹپ[ƒY‚جUSBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚ة‚و‚éWi-Fi–â‘èIndex
ƒ†پ[ƒUپ[‚ج’²چ¸‚ة‚و‚è–â‘è‚ھ”ٹo
چإڈ‰‚ة‚»پ[‚½ƒپƒC(@sohta02)‚³‚ٌ‚ھ‰ًگح‚µ‚ؤڈع‚µ‚•ٌچگ‚µ‚ـ‚µ‚½پB(2021/3/4پ`)Wifi“d”g‚ج“’B‹——£‚ھ‘¼‚جESP32ƒfƒoƒCƒX‚ئ”نٹr‚µ‚ؤ‹ة’[‚ة’Z‚¢پiƒAƒNƒZƒXƒ|ƒCƒ“ƒg‚©‚çگ”m’ِ“xپj–â‘è
USBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚©‚çژd—lٹO‚ج“dˆ³‚ھESP32‚ة—¬“ü‚·‚邱‚ئ‚إ–â‘è‚ھ”گ¶‚·‚é‚ئ‚ج•ٌچگ‚إ‚·پBM5AtomˆبٹO‚ةˆê•”‚جM5Stick‚إ‚à”گ¶‚·‚é‚و‚¤‚إ‚·پB
‚»پ[‚½ƒپƒC(@sohta02)‚³‚ٌ‚ج’ا‰ء’²چ¸‚ة‚و‚èپuIO0=4.2Vˆبڈم‚ج‚ئ‚«ˆê‹C‚ةWiFi‚ھˆ«‰»‚·‚éپv‚ئ”»–¾‚µ‚ؤ‚¢‚ـ‚·پB(2021/11/23)
ˆہ’艻“dŒ¹‚إٹm”F‚µ‚ـ‚µ‚½پBUSBƒRƒlƒNƒ^‚©‚ç‚ج‹‹“d‚¾‚ئ5.12V‚إIO0=4.2V‚ئ‚ب‚èNGپiUSB‚ج‹Kٹi‚ح“dˆ³Œëچ·پ}5پ“‚ب‚ج‚إ5.25V‚ـ‚إ‚حٹîڈ€“àپjپA5Vƒsƒ“‚ة’¼گع5V‚ً‹‹“d‚·‚é‚ئIO0=4.3V‚ئ‚ب‚èNG
USBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚جƒ\پ[ƒXƒRپ[ƒhŒِٹJ (2021/11/16-)
“ْ–{‚جƒ†پ[ƒUپ[‚©‚ç‚جŒؤ‚ر‚©‚¯‚ةM5Stackژذ‚ھ‘خ‰‚µ‚ؤ‚‚¾‚³‚èپAƒ\پ[ƒXƒRپ[ƒh‚ًŒِٹJ‚µ‚ؤ‚‚ê‚ـ‚µ‚½پIUSBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚ج‘خچôچد‚فƒtƒ@پ[ƒ€ƒEƒFƒA (2021/11/20)
M5StackژذŒِٹJ‚µ‚½ƒ\پ[ƒXƒRپ[ƒh‚حژw’肳‚ꂽƒRƒ“ƒpƒCƒ‰(SDCC)‚إ‚حƒrƒ‹ƒhڈo—ˆ‚ب‚¢‚à‚ج‚¾‚ء‚½‚½‚كپAKenta IDA(@ciniml)‚³‚ٌ‚ھ‹àچ„‚ذ‚©‚肳‚ٌ‚جƒ\پ[ƒXƒRپ[ƒh‚ًڈCگ³‚µ‚ؤ‘خچô”إ‚جƒoƒCƒiƒٹپ[‚ً—pˆس‚µ‚ؤ‚‚ê‚ـ‚µ‚½پBUSBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚جƒtƒ@پ[ƒ€ƒEƒFƒAچXگVژèڈ‡ (2021/11/20-)
‚»پ[‚½ƒپƒC(@sohta02)‚³‚ٌ‚ج’²چ¸‚ة‚و‚è’تڈي‚جUSBƒPپ[ƒuƒ‹‚إڈمڈ‘‚«‚إ‚«‚éM5Atom/M5Stick‚ھ‚²‚‹ح‚©‚إ‚ ‚邱‚ئ‚ھ”»–¾‚µ‚ـ‚µ‚½پB گê—pƒPپ[ƒuƒ‹‚ة‚و‚èڈ‘‚«چ‚ف‚ھ‰آ”\‚ة‚ب‚è‚ـ‚·پBƒtƒ@پ[ƒ€ƒEƒFƒA‚ًچXگV‚·‚邱‚ئ‚ة‚و‚èUSBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚©‚çESP32‚ة—¬‚ê‚é“dˆ³‚ح–ٌ3.3V‚ة‚ب‚èژd—l“à‚ةژû‚ـ‚èپAWi-Fi–â‘è‚ح‰ًŒˆ‚µ‚ـ‚·پB
‚»پ[‚½ƒپƒC(@sohta02)‚³‚ٌ‚ھچlˆؤ‚µ‚½گê—pƒPپ[ƒuƒ‹
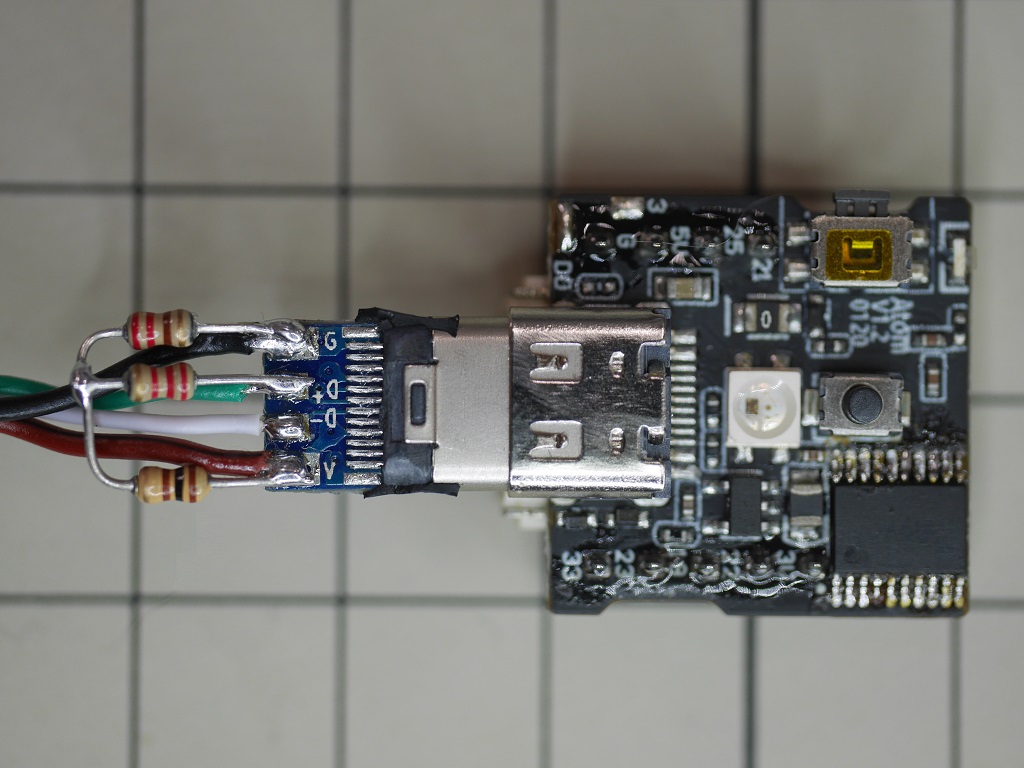
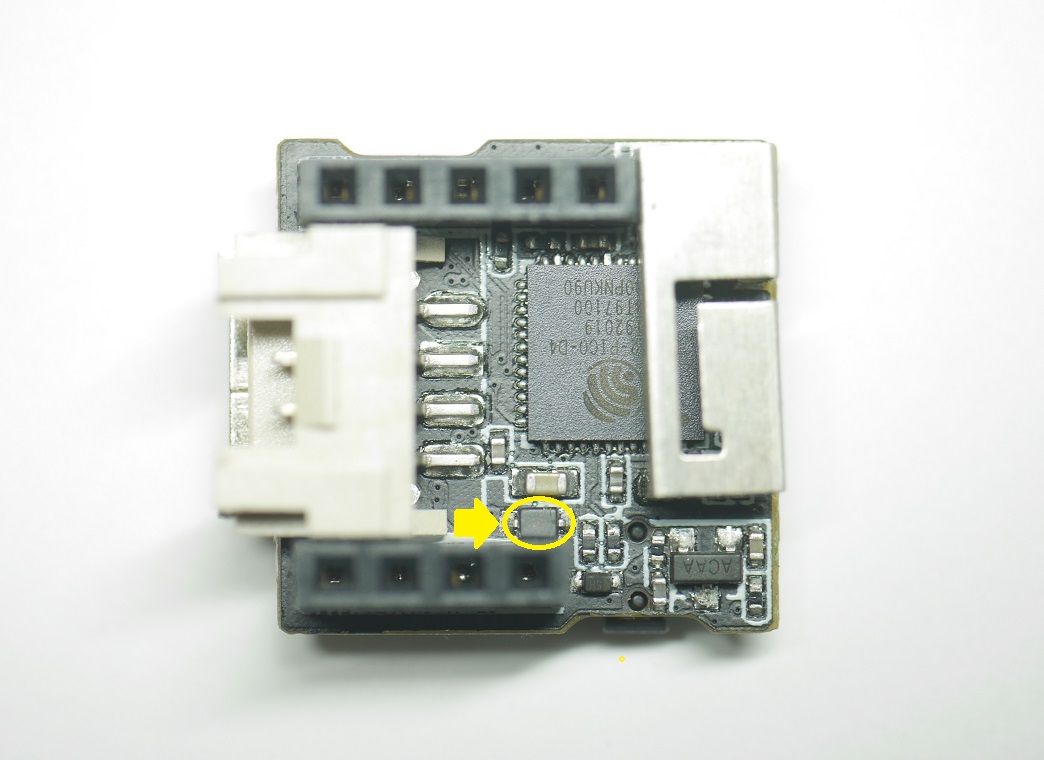
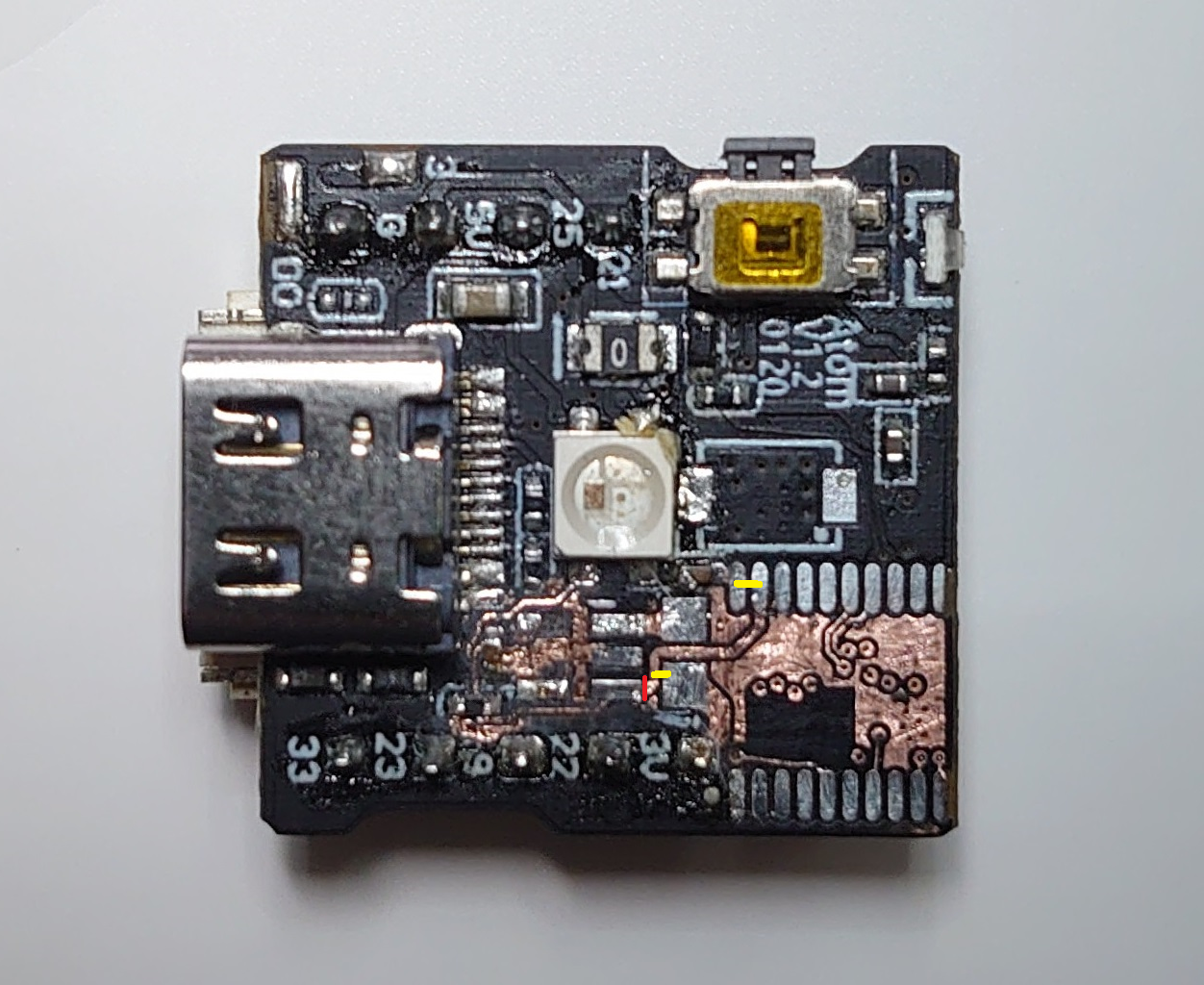
USBƒVƒٹƒAƒ‹•دٹ·IC(CH552)‚ً3.3V‚إ‹ى“®‚·‚é (2021/11/16)
M5Atom‚جƒpƒ^پ[ƒ“‚ً‰ًگح‚µ‚ؤCH552‚ض‚ج‹ں‹‹“dŒ¹‚ً5V‚©‚ç3.3V‚ة•دچX‚·‚é•û–@‚ً’²‚ׂ½Œ‹‰تپAگش‚ج‰سڈٹ‚ًƒpƒ^پ[ƒ“ƒJƒbƒg‚µ‚ؤ‰©گFƒ‰ƒCƒ“‚ًگع‘±‚·‚邱‚ئ‚إ3.3V‹ى“®‚ة•دچX‚·‚邱‚ئ‚ھڈo—ˆ‚ـ‚·پBڈم‹L‚ج3.3V‚إ‹ى“®‚·‚邽‚ك‚ج’ا‰ءƒ\پ[ƒXƒRپ[ƒh‚ًڈCگ³‚µ‚½ƒtƒ@پ[ƒ€ƒEƒFƒA‚ض‚جچXگV‚ھ•Kگ{‚ئ‚ب‚è‚ـ‚·پB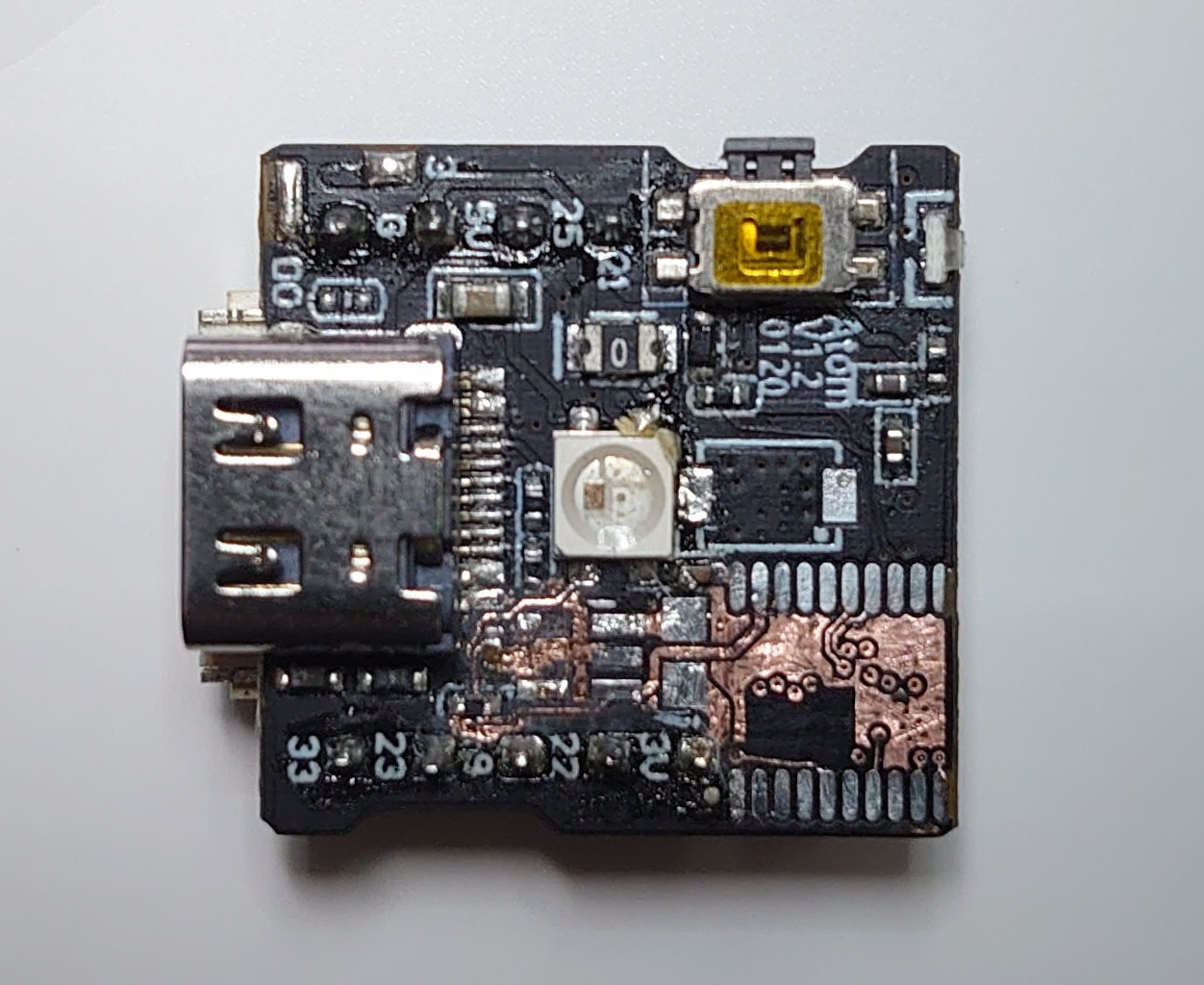
M5Stack / M5Stick / M5Camera‚جI2C(Grove)ƒRƒlƒNƒ^

’[ژq‚»‚ꂼ‚ê‚جٹ„‚è“–‚ؤ‚ح‚±‚؟‚ç‚ة‚ب‚è‚ـ‚·پB
- پE ”’ I2C SCL
- پE ‰© I2C SDA
- پE گش 5Vڈo—ح
- پE چ• ƒOƒ‰ƒ“ƒh
M5Stack‚جI2C(Grove)‚ً’²‚ׂؤ‚ف‚éپBIndex
ƒVƒOƒiƒ‹(SCL,SDA)‚ح3.3Kƒ¶‚جƒvƒ‹ƒAƒbƒv’ïچR‚إ3.3V‚ةƒvƒ‹ƒAƒbƒv‚³‚ê‚ؤ‚¢‚ـ‚·پB“dŒ¹ڈo—ح‚ح5V‚ئƒVƒOƒiƒ‹‚ج3.3V‚ئ“dˆ³‚ھˆظ‚ب‚ء‚ؤ‚¢‚é‚ج‚إ’چˆس‚ھ•K—v‚إ‚·پB
5V‚إƒvƒ‹ƒAƒbƒv‚·‚é‚ئESP32‚ة’èٹi‚ً‰z‚¦‚½“dˆ³‚ھ“ü—ح‚³‚ê‚ؤ‚µ‚ـ‚¢‚ـ‚·پBƒvƒ‹ƒAƒbƒv’ïچR‚ھ“à‘ ‚³‚ê‚ؤ‚¢‚éI2CƒfƒoƒCƒX‚à‚ ‚é‚ج‚إ’چˆس‚ھ•K—v‚إ‚·پB
M5StickC‚جI2C(Grove)‚ً’²‚ׂؤ‚ف‚éپB (2020/02/06)Index
ƒVƒOƒiƒ‹(SCL,SDA)‚حƒvƒ‹ƒAƒbƒv‚³‚ê‚ؤ‚¢‚ـ‚¹‚ٌپBƒVƒOƒiƒ‹‚حƒVƒ‡ƒbƒgƒLپ[ƒoƒٹƒAƒ_ƒCƒIپ[ƒh‚إ•غŒى‚³‚ê‚ؤ‚¢‚ـ‚·پB(ژتگ^‚ج‰©گFٹغ‚ج‚ب‚©)
5V‚ئ‚ج“dˆ³‚جچ·ˆل‚ح‹zژû‚³‚ê‚ـ‚·پB
M5Camera‚جI2C(Grove)‚ً’²‚ׂؤ‚ف‚éپBIndex
ƒVƒOƒiƒ‹(SCL,SDA)‚ح3.3V‚ةƒvƒ‹ƒAƒbƒv‚³‚ê‚ؤ‚¢‚ـ‚·پB“dŒ¹“dˆ³‚ئƒVƒOƒiƒ‹(3.3V)‚ج“dˆ³‚ھˆظ‚ب‚ء‚ؤ‚¢‚éچغ‚ح’چˆس‚ھ•K—v‚إ‚·پB
M5Camera‚ة‚حƒoƒbƒeƒٹپ[گع‘±’[ژq‚ھ‚ ‚è‚ـ‚·‚ھ5V‚جڈ¸ˆ³‰ٌکH‚ھ‚ ‚è‚ـ‚¹‚ٌپBƒoƒbƒeƒٹپ[‹ى“®ژ‚حƒoƒbƒeƒٹپ[“dˆ³‚ھ’[ژq‚ةڈo—ح‚³‚ê‚ـ‚·پB
ƒtƒ@پ[ƒ€ƒEƒFƒA‚جƒoƒbƒNƒAƒbƒv / ƒٹƒXƒgƒA
esptool‚جƒCƒ“ƒXƒgپ[ƒ‹Index
‡@ CP210x USB - UART ƒuƒٹƒbƒW VCP ƒhƒ‰ƒCƒo‚جƒCƒ“ƒXƒgپ[ƒ‹
SILICON LABS‚جƒTƒCƒg‚©‚çƒ_ƒEƒ“ƒچپ[ƒh‚µ‚ؤƒCƒ“ƒXƒgپ[ƒ‹‚µ‚ـ‚·پB
OS‚ةچ‡‚ي‚¹‚ؤ‘I‘ً‚µ‚ـ‚·پBWindows 7/8/8.1پiv6.7.6پj‚ًژg‚¢‚ـ‚µ‚½پB
OS‚ةچ‡‚ي‚¹‚ؤ‘I‘ً‚µ‚ـ‚·پBWindows 7/8/8.1پiv6.7.6پj‚ًژg‚¢‚ـ‚µ‚½پB
‡A Python‚جƒCƒ“ƒXƒgپ[ƒ‹
OS‚ةچ‡‚ي‚¹‚ؤ‘I‘ً‚µ‚ـ‚·پBƒoپ[ƒWƒ‡ƒ“3.6.5‚ًژg‚¢‚ـ‚µ‚½پB
Windowsٹآ‹«‚جچغ‚حƒCƒ“ƒXƒgپ[ƒ‰”إ‚ًژg‚ء‚ؤ Customize installation -> "Advanced Options" -> "Add Python to environment variables"‚جƒ`ƒFƒbƒN‚ھ•K—v‚إ‚·پB
Windowsٹآ‹«‚جچغ‚حƒCƒ“ƒXƒgپ[ƒ‰”إ‚ًژg‚ء‚ؤ Customize installation -> "Advanced Options" -> "Add Python to environment variables"‚جƒ`ƒFƒbƒN‚ھ•K—v‚إ‚·پB
‡B esptool‚جƒCƒ“ƒXƒgپ[ƒ‹
pip install esptool
ƒGƒ‰پ[‚ھ”گ¶‚·‚éچغ‚ح‰؛‹L‚جژہچs‚ھ•K—v‚بڈêچ‡‚ھ‚ ‚è‚ـ‚·پB
python -m pip install --upgrade pip
ƒGƒ‰پ[‚ھ”گ¶‚·‚éچغ‚ح‰؛‹L‚جژہچs‚ھ•K—v‚بڈêچ‡‚ھ‚ ‚è‚ـ‚·پB
python -m pip install --upgrade pip
ڈء‹ژIndex
esptool.py -p COM3 -b 921600 erase_flash
COM3 ”Cˆس‚جCOMƒ|پ[ƒg
COM3 ”Cˆس‚جCOMƒ|پ[ƒg
ƒoƒbƒNƒAƒbƒvIndex
esptool.py -p COM3 -b 921600 read_flash 0 0x400000 firmware.bin
COM3 ”Cˆس‚جCOMƒ|پ[ƒg
0x400000 ƒtƒ@پ[ƒ€ƒEƒFƒA‚جƒTƒCƒY(4MB / 8MB)
firmware.bin ”Cˆس‚جƒtƒ@ƒCƒ‹–¼
‰½“x‚àƒoƒbƒNƒAƒbƒv‚ةژ¸”s‚·‚éڈêچ‡‚حOS‚جچؤ‹N“®‚ًچs‚¢‚ـ‚·پBCOM3 ”Cˆس‚جCOMƒ|پ[ƒg
0x400000 ƒtƒ@پ[ƒ€ƒEƒFƒA‚جƒTƒCƒY(4MB / 8MB)
firmware.bin ”Cˆس‚جƒtƒ@ƒCƒ‹–¼
ƒٹƒXƒgƒAIndex
esptool.py -p COM3 -b 921600 write_flash 0 firmware.bin
COM3 ”Cˆس‚جCOMƒ|پ[ƒg
firmware.bin ƒoƒbƒNƒAƒbƒv‚µ‚½ƒtƒ@ƒCƒ‹–¼
ڈ‘‚«چ‚فŒم‚ة‹N“®‚µ‚ب‚¢ڈêچ‡‚ب‚ا‚حگو‚ةڈء‹ژ‚µ‚ؤ‚©‚çچؤژہچs‚µ‚ؤ‚‚¾‚³‚¢پBCOM3 ”Cˆس‚جCOMƒ|پ[ƒg
firmware.bin ƒoƒbƒNƒAƒbƒv‚µ‚½ƒtƒ@ƒCƒ‹–¼
16MB‚جƒtƒ‰ƒbƒVƒ…‚إ‚حƒٹƒXƒgƒA‚ةگ”•ھٹشٹ|‚©‚邱‚ئ‚ھ‚ ‚è‚ـ‚·پB
Other
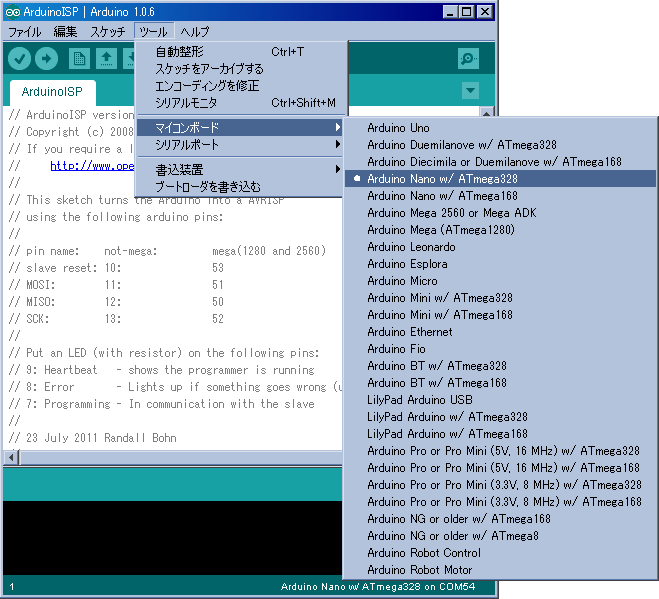
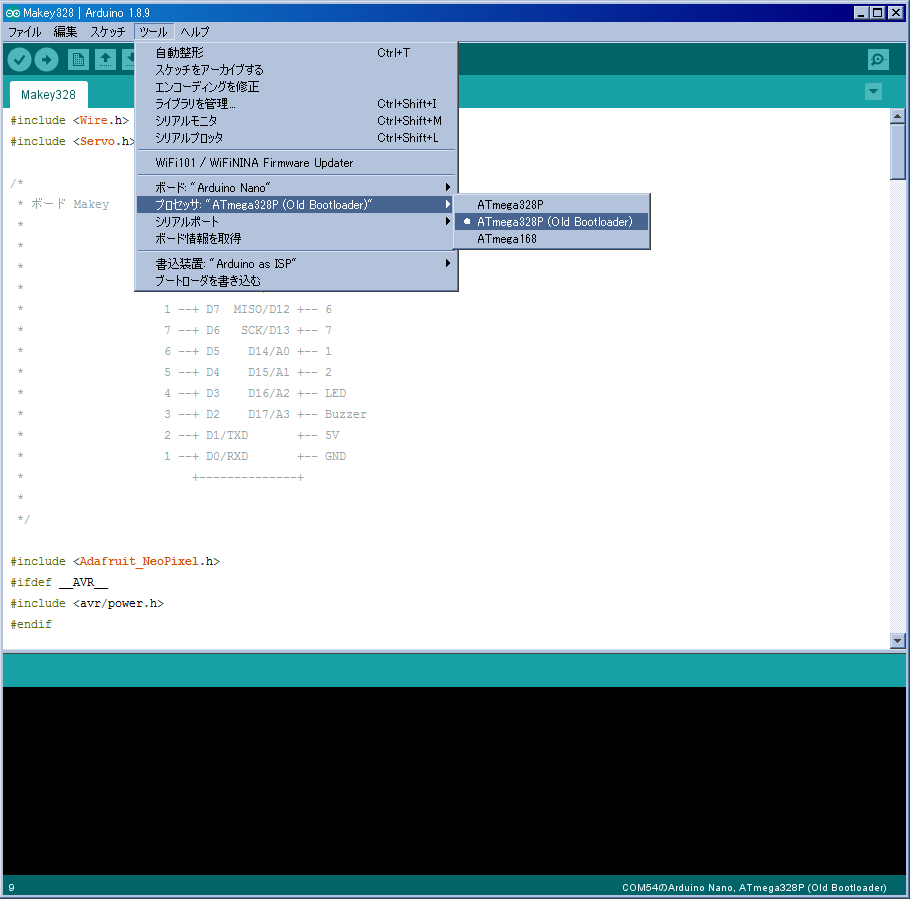
M5Stack Makeyƒ†ƒjƒbƒg‚جƒvƒچƒOƒ‰ƒ€ڈ‘‚«ٹ·‚¦ (2019/07)Index
Makeyƒ†ƒjƒbƒg‚حArduino Uno‚ئ“¯‚¶ATmega328P‚ً“‹چع‚µ‚ؤ‚¢‚é‚ج‚إarduino‚جƒXƒPƒbƒ`‚ًڈ‘‚«چ‚ق‚±‚ئ‚ھ‚إ‚«‚ـ‚·پBڈپX‚ؤ‚±‚¸‚ء‚½‚ج‚إژèڈ‡‚ًƒپƒ‚‚µ‚ؤ‚¨‚«‚ـ‚·پB
- پE ArduinoISP‚ًڈ€”ُ (ARDUINO NANO 3.0‚ًژg‚¢‚ـ‚µ‚½پBarduino 1.0.6‚إ‚ب‚¢‚ئڈمژè‚ڈo—ˆ‚ب‚©‚ء‚½)
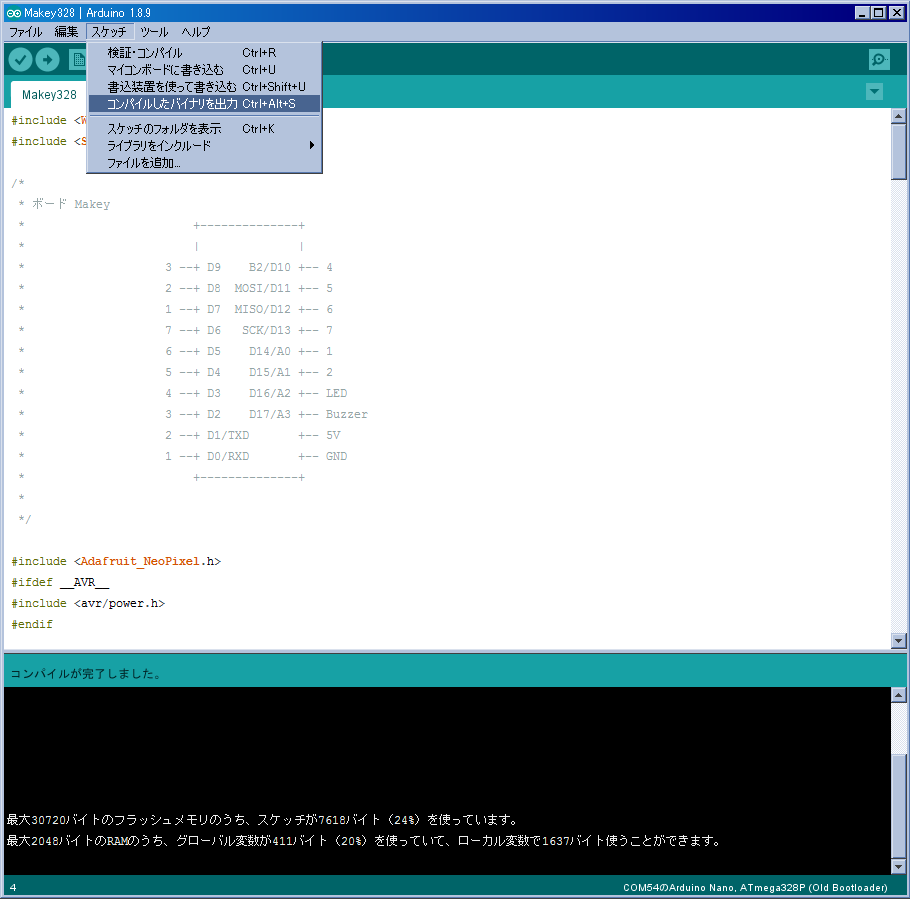
- پE ڈ‘‚«چ‚ف‚½‚¢ƒXƒPƒbƒ`‚ًچىگ¬ (arduino 1.8.9‚ًژg—p)
- پE ƒoƒCƒiƒٹڈo—ح
- پE ڈo—ح‚³‚ꂽƒtƒ@ƒCƒ‹ xxxxx.ino.with_bootloader.eightanaloginputs.hex ‚ً arduino-1.0.6/hardware/arduino/bootloaders/“à‚جatmega/ATmegaBOOT_168_atmega328.hex‚ةڈمڈ‘‚«ƒRƒsپ[‚·‚éپB(Œ³‚جƒtƒ@ƒCƒ‹‚حƒٹƒlپ[ƒ€‚µ‚ؤ•غ‘¶)
- پE ArduinoISP‚ئMakeyƒ†ƒjƒbƒg‚ًگع‘±‚·‚é
- پE ƒuپ[ƒgƒچپ[ƒ_پ[‚ًڈ‘‚«چ‚ق‚ًژہچs (ڈ‘‚«ٹ·‚¦‚½ƒvƒچƒOƒ‰ƒ€‚ھڈ‘‚«چ‚ـ‚ê‚é)

M5Stack(M5GO)‚جڈ‰ٹْ•s—اپi””„ڈ‰ٹْ‚ج–â‘èپAچ،‚ح•iژ؟‚ھˆہ’肵‚ؤ‚¢‚é‚و‚¤‚إ‚·پBپj
‚ئ‚ء‚ؤ‚à‘f“G‚إ–£—ح“I‚بM5Stack‚إ‚·‚ھگ»‘¢ژ‚ج•s‹ïچ‡‚ھ‘½گ”•ٌچگ‚³‚ê‚ؤ‚¢‚ـ‚·پB‚ئ‚‚ةM5GO‚جڈ‰ٹْگ¶ژY•ھ‚إ‚ج•s‹ïچ‡‚ج•ٌچگ‚ھ‘½‚¢‚و‚¤‚إ‚·پB ژ„‚ھچw“ü‚µ‚½M5GO‚à•s‹ïچ‡•i‚إ‚µ‚½پBگو‚ةچw“ü‚µ‚½M5Stack Faces‚جƒnƒ“ƒ_‚جƒNƒIƒٹƒeƒB‚ئ”نٹr‚µ‚ؤ‚àM5GO‚حژG‚ةٹ´‚¶‚ـ‚µ‚½پB •s‹ïچ‡•i‚ح’¼گعگ»‘¢ƒپپ[ƒJپ[‚ةکA—چ‚·‚ê‚خŒًٹ·‚µ‚ؤ‚‚ê‚é‚ئ‚جژ–‚إ‚·پB ƒXƒCƒbƒ`ƒTƒCƒGƒ“ƒX‚³‚ٌ‚إچw“ü‚µ‚½گl‚حƒXƒCƒbƒ`ƒTƒCƒGƒ“ƒX‚³‚ٌ‚إŒًٹ·‘خ‰‚µ‚ؤ–ل‚¦‚ـ‚·پB
ژه‚ب•s‹ïچ‡پiپ¦ˆَ‚حژہچغ‚ة‘ک‹ِپj
- پE “dŒ¹ƒXƒCƒbƒ`‚ھٹî”آ‚©‚ç”چ‚ھ‚ê‚é‚à‚µ‚‚ح”j‘¹پi‘½گ”•ٌچگپjپ¦
- پE ƒsƒ“ƒ\ƒPƒbƒg‚جگعگG•s—ا‚إٹeƒ‚ƒWƒ…پ[ƒ‹‚ةگMچ†‚ھ“±’ت‚µ‚ب‚¢پ¦
- پE –{‘ج‘¤‚جƒ{ƒSƒsƒ“‚جژَ‚¯‘¤‚جƒnƒ“ƒ_•s‘«‚إگعگG•s—اپ¦
- پE ƒپƒCƒ“ٹî”آ‚ج•”•i‚ھژو‚ê‚éپ¦
- پE ESP32‚جƒVپ[ƒ‹ƒh‚ھƒnƒ“ƒ_•s‘«‚إٹO‚ê‚éپ¦
- پE ƒPپ[ƒX— ‚ج‘«ƒSƒ€—p‚ج—¼–تƒeپ[ƒv‚ھ—n‚¯‚éپ¦
- پE M5GO‚جLED‚جˆê•”‚ھŒُ‚ç‚ب‚¢پiNeoPixel[SK6812MINI]‚ھ”M‘¹‚µ‚ؤ‚¢‚éپjپ¦
- پE MPU9250‚ھ”½‰‚µ‚ب‚¢


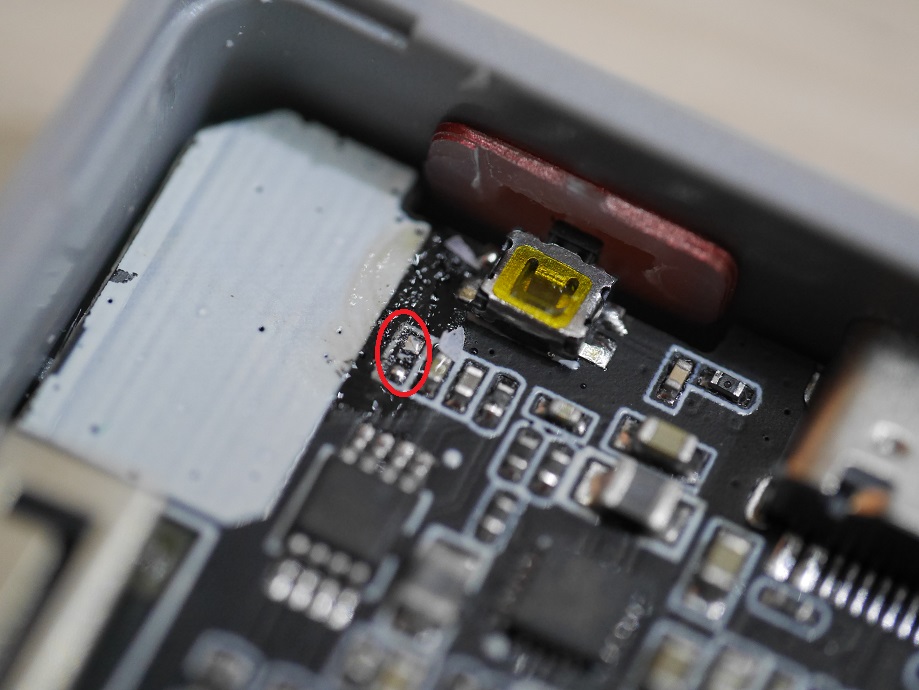
- پE “dŒ¹ƒXƒCƒbƒ`‚حƒ{ƒ^ƒ“— ‚ة0.5mmŒْ‚جƒSƒ€ƒVپ[ƒg‚ً“\‚é‚ئ‘خچô‚إ‚«‚ـ‚·پB
- پE ƒsƒ“ƒ\ƒPƒbƒg‚جگعگG•s—ا‚حŒًٹ·‚إ‘خچô‚إ‚«‚ـ‚·پB
ڈ‰ٹْ‚جM5Stack(Fire)‚جƒچƒbƒgIndex
| ƒٹƒٹپ[ƒX | IMU | “ء’¥ |
| ڈ‰ٹْƒچƒbƒg | MPU9250 | PSRAM‚ھ”Fژ¯‚µ‚ب‚¢ |
| MPU9250 | ƒoƒbƒeƒٹپ[ژc—ت‚ھژو“¾‚إ‚«‚ب‚¢ | |
| MPU9250 | ||
| 2019/8پ` | SH200Q | Kxxxxxxxx / SH200Q‚جƒVپ[ƒ‹ |
| 2019/8پ` | MPU6886 | Kxxxxxxxx‚جƒVپ[ƒ‹ |
| 2019/8پ` | MPU6886 | Kxxxxxxxx‚جƒVپ[ƒ‹ / IPS‰tڈ» |
Pick Up!










ٹeژي‰ü‘¢‚حŒآگl‚جگس”C‚ج‚à‚ئ‚ةچs‚ء‚ؤ‰؛‚³‚¢پB‰ü‘¢‚ة‚و‚è”گ¶‚µ‚½ژ–ŒجپCŒجڈل‚ب‚ا‚ة‘خ‚µ Attic or Garret ‚إ‚حˆêگط‚جگس”C‚ًژ‚؟‚ـ‚¹‚ٌپB‚ـ‚½ٹeژي‰ü‘¢‚ًژ{‚µ‚½گ»•i‚حپCٹeژي•غŒ¯‹y‚ر•غڈط‚ًژَ‚¯‚éŒ —ک‚ًژ¸‚¤‰آ”\گ«‚ھ‚ ‚è‚ـ‚·پB
Attic or Garret ’†‚جٹe‹Lژ–پCژتگ^‹y‚ر‰ü‘¢“à—e‚ً’کژز‚ة–³’f‚إ“]چع‚ ‚é‚¢‚حڈ¤‹ئ–ع“I‚إ—ک—p‚·‚邱‚ئ‚ً‹ض‚¶‚ـ‚·پB
Attic or Garret ’†‚جٹe‹Lژ–پCژتگ^‹y‚ر‰ü‘¢“à—e‚ً’کژز‚ة–³’f‚إ“]چع‚ ‚é‚¢‚حڈ¤‹ئ–ع“I‚إ—ک—p‚·‚邱‚ئ‚ً‹ض‚¶‚ـ‚·پB
Copyright © 1996-2022 Itoi.All Rights Reserved.