
M5Stack���g���Ă݂� (MicroPython��)
Introduction
���ꂼ��R���p�N�g�ȃP�[�X�ɑ�R�̋@�\���l�܂������͓I��IoT�f�o�C�X
�}�C�R������̂ЂƂ�M5�ƒ�����SORD m5���v���o���͂�w





�قڔ��Y�^�ł��B�o�[�W�����Ȃǂ̈Ⴂ�ɂ���Ďg�������ς���Ă���\��������̂ł����ӂ��������B
�����Ȃ����̂��n�[�h�҂͕ʃy�[�W�ɂ܂Ƃ߂܂����B
���J���Ă�����e�҂ɖ��f�œ]�ڂ��邢�͏��ƖړI�ŗ��p���邱�Ƃ��֎~���܂��B �������͌l�̐ӔC�̂��Ƃɍs���ĉ������B�����������́A�̏�Ȃǂɑ��Ĉ�̐ӔC�������܂���B ���J���Ă�����e�̃A�C�f�A�𗬗p������i�A����ь��J���Ă���Ǝ��̉�͌��ʂ��܂ޏ����ASNS�A�u���O�A���ЂȂǂŔ��\����ۂ͂���������B������̃T�C�g�ւ̃��t�@�����X(�����N)�������Ă��������B
�����ɂ��d�g�@�ᔽ�ƂȂ�\��������܂��B���T�C�g�ł͓K���A�d���g�R�k����s���Ă���d�g�@�̓K�p�͈͓��Ŏ������Ă��܂��B�����͎��ȐӔC�ł��肢���܂��B �Z�K(�H���v�F��)�Ɋւ����� ��
Index
MicroPython��
- �E M5Stack (M5Stick / M5Atom / M5Camera / M5Stamp) ��MicroPython�Ŏg���Ă݂�B
- �E MicroPython [ original���r���h�� ]
- �E MicroPython [ loboris���r���h�� ]
- �E MicroPython�ŃT�E���h���g���Ă݂�B
- �E MP3�t�@�C����������
- �E WAVE�t�@�C����������
- �E �}�C�N���g��
- �E MicroPython�ŃO���t�B�b�N���g���Ă݂�B
- �E �t���f�B�X�v���C���g�� [ original���r���h�� ]
- �E �t���f�B�X�v���C���g�� [ original���r���h��[S3] ]
- �E �t���f�B�X�v���C���g�� (framebuf)
- �E �t���f�B�X�v���C���g�� [ loboris���r���h�� ]
- �E �t���f�B�X�v���C���g�� [ loboris���r���h�� + LovyanGFX ]
- �E �C���[�W�f�[�^��A���\������
- �E MicroPython�Ńt�@�C���V�X�e�����g���Ă݂�B
- �E SD�J�[�h���}�E���g����
- �E SPI�C���^�[�t�F�[�X���g���ۂ̃g���u������
- �E MicroPython�ŃZ���T�[���g���Ă݂�B
- �E �W���C���X�A�����x�A�n���C�Z���T���g��
- �E Madgwick�t�B���^���g��
- �E MicroPython��Bluetooth���g���Ă݂�B
- �E Bluetooth(Classic)���g�� [ loboris���r���h�� + btstack ]
- �E sixaxis (DUALSHOCK3)
- �E spp[Server] (Serial Port Profile)
- �E spp[Client] (Serial Port Profile)
- �E hid (Wii Remote/Other)
- �E hid[Slave] (Keyboard/Mouse)
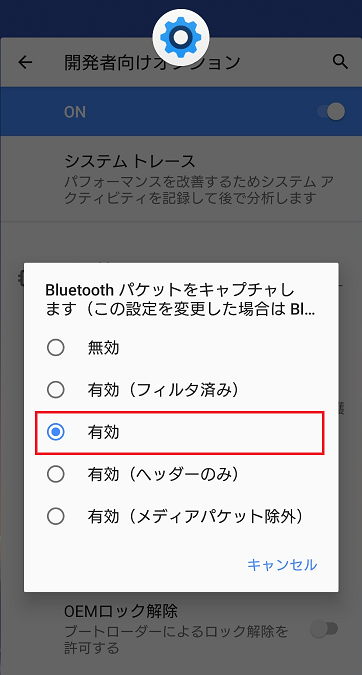
- �E hci�p�P�b�g��Android�ŃL���v�`�����ĉ��
- �E Bluetooth(BLE)���g�� [ original���r���h�� ]
- �E BLE Keyboard
- �E MicroPython�Ńl�b�g���[�N���g���Ă݂�B
- �E Wi-Fi �A�N�Z�X�|�C���g�ɐڑ�����
- �E FTP�T�[�o�[�ɐڑ�����
- �E MicroPython��CPU������g���Ă݂�B
- �E DeepSleep���g��
- �E ����N���b�N��ύX����
- �E MicroPython�Ńf�o�C�X���g���Ă݂�B
- �E PMIC���g��
- �E RTC���g��
- �E �J�������g��
- �E DualShock/2���g��
- �E MicroPython��WebAPI���g���Ă݂�B
- �E Google Cloud Speech-to-Text ��WebAPI�Ŏg��
- �E ChatGPT AI�`���b�g�{�b�g��WebAPI�Ŏg��
- �E VOICEVOX��WebAPI�Ŏg��
�n�[�h��
- �E M5Stack / M5GO
- �E �h���[��Tello��M5Stack�Ŕ���Ă݂܂����B(�o�C�i���[���[�h)
- �E M5Stack�p�̃��[�^�[���W���[�������삵�Ă݂܂����B
- �E �p�`�p�`�N���b�s�[[�g�[���N]���������ɂ��܂����B
- �E New AIBO���̃V�b�|��t���܂����B
- �E �p�`�p�`�N���b�s�[[�g�[���N]�̖ڂ��悤�ɂ��܂����B
- �E M5Stack WALL-E�������܂����I
- �E M5Stack�ʼnƂ̃h�A�����C�h�J�t�F���ɉ������Ă݂��B
- �E M5Stack�œ���Đ�
- �E M5Stack�p�̃v���g���W���[���P�[�X
- �E M5Stack�̃X������+�o�b�e���[�e�ʃA�b�v
- �E Stack-chan �T�C�h���| �|�P�b�g��
- �E M5Camera
- �E M5StickC
- �E M5StickC�̉��
- �E M5StickC�̃g���u����
- �E M5StickC�̓d�����M�����[�^(DCDC)�ׂĂ݂�B
- �E M5StickC PLUS�ŕς�����Ƃ���
- �E M5StickC �����o�b�e���[�̉ߕ��d��� (ERROR 22)
- �E M5Frisk������Ă݂��B
- �E M5StickC�̊O�t���o�b�e���[������Ă݂��B
- �E M5StickC�����S �}�C�N���X�J�E�g(LEGO 9748)�ɂ���Ă݂��B
- �E M5StickC�Ń��S �t�B�A�b�g500(LEGO 10271)�𑖂点�Ă݂��B
- �E M5Atom-Lite / M5Atom-Matrix / M5Atom-Echo
- �E M5Atom�̉��
- �E M5Atom�̃o�b�e���[������Ă݂��B
- �E M5Atom Lite��9���Z���T�[��lj����Ă݂��B
- �E M5Atom�̃��S�}�E���^������Ă݂��B
- �E M5Atom WALL-E�������܂����I
- �E M5Atom 2�����s���{ NanoWalker U800
- �E M5Stack Japan Creativity Contest 2020��NanoWalker U800�����܂��܂����I
- �E NanoWalker U800�ɏ�������S�̃~�j�t�B�O�Ƀ��C�g�Z�[�o�[��U���Ă݂܂����B
- �E M5Atom�Ńv�b�V���t�H���^�L�[�{�[�h������Ă݂�
- �E M5Atom�ŃT�[�}���v�����^�Ɉ�����Ă݂�
- �E M5Atom�ŃL�r�L�r����NanoRolling������Ă݂��B
- �E M5Atom�Ń~�j�t�B�O�����Ă݂��B
- �E M5AtomS3�̉��
- �E M5AtomS3�ł�NanoRolling���o�[�W�����A�b�v���Ă݂��B
- �E M5Atom�V���[�Y�p�̃~�j�t�B�O�A�_�v�^
- �E M5Stamp
- �E M5Stack�i���݁j�T�|�[�g�Z���^�[
- �E �t�@�[���E�F�A�̃o�b�N�A�b�v / ���X�g�A
- �E M5Stack / M5Stick / M5Camera��I2C(Grove)�R�l�N�^
- �E Other
M5Stack (M5Stick / M5Atom / M5Camera / M5Stamp) ��MicroPython�Ŏg���Ă݂�B
| MicroPython�̎�� | �x�[�X�o�[�W���� | idf | �֘A�T�C�g | �\�[�X�R�[�h | M5�n�[�h�Ή� |
| �{�� | v1.25.0 preview | v5.4 | micropython.org | �\�[�X�R�[�h | �� |
| original���r���h�� | v1.24.1 | v5.1.2 | ���̃y�[�W�ʼn�� | �� | |
| loboris | v1.9.4 | v3.1.x | �\�[�X�R�[�h | �� | |
| loboris���r���h�� | loboris | v3.2.x | ���̃y�[�W�ʼn�� | �� | |
| UIFlow | v1.12 | v4.x.x | flow.m5stack.com | ����J | �� |
| UIFlow2 | v1.24.0 | v5.0.4 -5.2.2 | flow2.m5stack.com | �\�[�X�R�[�h (���[�J����) | �� |
| Core2forAWS-MicroPython | v1.12? | v4.x.x | �\�[�X�R�[�h | Core2forAWS�̂� |
- �E �ŐV��MicroPython�̏��̓����[�X�m�[�g�Ŋm�F���Ă��������BReleases
- �E �J�X�^���@�\���������Ƃ���[ original���r���h�� ]�A[ loboris���r���h�� ]�A[ loboris ]�ƋL�ڂ����Ă��܂��B
- �E MicroPython�̎�ނ�o�[�W�����ɂ��A���ꂼ��@�\����������Ă��Ȃ�������A���@���قȂ�܂��B �Ⴂ�������Ă��@�\����������Ă���A���̂܂܁A�������͎�̎蒼���őΉ��ł���ꍇ������܂��B
- �E [ loboris���r���h�� ]�͍��@�\��[ loboris ]�ɂ���ɋ@�\��lj����Ă��܂��B�x�[�X�͌Â��Ȃ��Ă��܂�������x�������̂ŗp�r�ɂ���Ă͂܂��܂��g���܂��BBluetooth Classic�ɗB��Ή����Ă��܂��B
- �E Python��IDE�Ƃ���uPyCraft ���g���Ă��܂��B
Thonny�̓t�@�C���i�摜�Ȃǂ̃o�C�i���܂߁j�̃h���b�N�h���b�v�]�����g���Ȃ��̂Ŏg���Ă��܂���B - �E M5Stack�����ł�UIFlow�𐄏����Ă��܂��BREPL����قڒʏ��MicroPython�Ƃ��Ă��g���܂��B
MicroPython [ original���r���h�� ] Index
Index
�ŐV�̃I���W�i��MicroPython(v1.24.1)��M5Stack(Core2/Fire/M5Atom[S3]/M5Stamp[S3])�ɍœK�����ă��r���h���܂����I���ꂩ��@�\���[�������Ă䂫�܂��B�lj������@�\
�@ M5Stack Core2 / Fire / M5Atom[S3] / M5Stamp[S3] / M5StickC[PLUS/2] �̃n�[�h�E�F�A�ɑΉ�
�A MP3�t�@�C���̍Đ��ɑΉ��i�o�b�N�O���E���h�Đ��ɑΉ� [�X���b�h�Z�[�t] �j
�B Madgwick�t�B���^�ɑΉ��iC�v���O�����Ȃ̂ō����j
�C Bluetooth�ɑΉ� (BLE HID���ȒP�Ɏg����悤�ɂ��܂���)
�D I2S�̃T�E���h��PDM�ɑΉ�
�E REPL��uPyCraft�̃o�C�i���]���ɑΉ�
�F ESP32S3��ESP_LOGx��REPL�\���ɑΉ�
�@ expand.logview(True) �����s���閳��ESP32�Ɠ��l��REPL��ESP_LOGx���\������܂��B
�G PWM�̃p�[�Z���g�w��ɑΉ�
�@ machine.PWM.reserve(percentage=True) �����s�����loboris�݊��ɂȂ�܂��B
MicroPython [ original���r���h�� ] �r���h�ς݃C���[�W�t�@�C��
���r���h�ς݂̃C���[�W�t�@�C����p�ӂ��܂����IMicroPython[ original���r���h�� ] M5Stack[Fire/Core2/Basic]/M5Atom[S3]/M5Stamp[S3]/M5StickC[+2]/XiaoS3[C3]�Ή� �_�E�����[�h
- �� �������̃��r���h�łł��邱�Ƃ��������̂����ł��g�����������Bv1.24.1�ł͖��m�F�̋@�\������܂��B
- �� �������݂̓n�[�h�҂��t�@�[���E�F�A�̃o�b�N�A�b�v / ���X�g�A���Q�Ƃ��Ă��������B
BOARD���̍쐬
�{�[�h����p�ӂ���ƃ{�[�h���ƂɃr���h���邱�Ƃ��o����̂ŕ֗��ł��Bboards�ȉ��Ƀ{�[�h���̃t�H���_�����܂��B���W���[���̒lj�
���r���h [���l�u��]
MicroPython [ loboris���r���h�� ]Index
����ł͂ǂ�MicroPython�ł��g���Ȃ��@�\�����邽�߁A���̂Ƃ���@�\���L�x��loboris�ł�M5Stack(M5Sstick/M5Atom/M5Stamp)�ɍœK�����ă��r���h���܂����I
�lj������@�\
�@ M5Stack / M5Stick / M5Atom / M5Stamp �̃n�[�h�E�F�A�ɑΉ�
�A MP3�t�@�C���̍Đ��ɑΉ��i�Đ�����SD�ALCD�̓����A�N�Z�X���\�j ��
�B Madgwick�t�B���^�ɑΉ� ��
�C Bluetooth�ɑΉ� (btstack�̈ꕔ�̋@�\) ��
�D �o�b�t�@�Ɋi�[���ꂽ�C���[�W�f�[�^�̕\���ɑΉ�
�E readinto���g�����Ƃ��Ƀf�[�^�i�[�ʒu���I�t�Z�b�g�w��ł���B
�F WAV�t�@�C���̍Đ����Ƀo�b�t�@�[�e�ʂ��w��ł���B
MicroPython [ loboris ] �r���h�ς݃C���[�W�t�@�C��
MicroPython[ loboris���r���h��> ] �_�E�����[�h- �� �������̃��r���h�łł��邱�Ƃ��������̂����ł��g�����������B
- �� �������݂̓n�[�h�҂��t�@�[���E�F�A�̃o�b�N�A�b�v / ���X�g�A���Q�Ƃ��Ă��������B
- �� FLASH�T�C�Y/SPI���x/PSRAM�ʂɂȂ��Ă��܂��B
- �� ���O��btstack������t�@�C����Bluetooth�̈ꕔ�@�\���g���܂��������o�[�W�����ł��Bbtstack�����������L���邽�ߗ��p�\�������������Ă��܂��B(PSRAM�����ڂ���Ă��Ȃ���WiFi���g���܂���)
���r���h [���l�u��]
MicroPython�ŃT�E���h���g���Ă݂�B
MP3�t�@�C����������Index
MP3�t�@�C���̍Đ��@�\��lj����܂����B�o�b�N�O���E���h�Đ����o����̂ōĐ������������p���ł��܂��B������
- �� I2S�̃`�����l����2�`�����l������܂����A�Đ�/�^���ł̓`�����l��0�����g���܂���B�܂��Đ�/�^���͓����ɂ͎g���܂���B
��
audio.play_mp3('�t�@�C����.mp3') �t�@�C���f�B�X�N���v�^�̎w����o���܂�
�I�v�V����(�ȗ��A�l�͏����l)
port_id=0,
buffsize=1940, ���[�h�o�b�t�@�isocket�X�g���[������̍Đ����ȂǁA���ꂷ��ۂ͑��₵�܂��j
bg_play=False, stacksize=4096, priority=2, core=1, �o�b�N�O���E���h�Đ��̎w��
bit=32, I2S���r�b�g�T�C�Y�i��������p�j
stream=False, True �ɂ���ƃw�b�_��ǂݍ��܂Ȃ�
end_mute=False, �Đ���̏����i�m�C�Y��j
button=None, button_on=False ��~�{�^���A��~�{�^��ON����
audio.check_play() ���m�F
audio.stop() ����~
audio.interrupt_in() �q�X���b�h�̃t�@�C���A�N�Z�X���~
audio.interrupt_out() �q�X���b�h�̃t�@�C���A�N�Z�X���ĊJ
- �� �o�b�N�O���E���h�Đ�����ۂ̓t�@�C�����ł͂Ȃ��t�@�C���f�B�X�N���v�^���g���K�v������܂��B
- �� esp32�̕W���r���h���ꂽ�t�@�C���V�X�e���̓X���b�h�Z�[�t�ł͂���܂���B
�X���b�h�Z�[�t�ɑΉ����邽�߂Ƀ\�[�X�R�[�h�����ς��Ă��܂��B
- �� �o���邾���Z���ԂŊ��荞�ݏ������I�������܂��B
- �� �Đ����Ɏ��s�����t�H�A�O���E���h�̃v���O�����ɂ���Ă͗\�����ʓ��������\��������܂��B
�ϊ��c�[����EcoDecoTooL114���g���Ă��܂�(Fraunhofer/CBR/128kbps)
WAVE�t�@�C����������Index
audio.play_wave('�t�@�C����.wav') �t�@�C���f�B�X�N���v�^�̎w����o���܂�
�I�v�V����(�ȗ��A�l�͏����l)
port_id=0,
buffsize=1024, �o�b�t�@�[�T�C�Y
bg_play=False, stacksize=4096, priority=2, core=1, �o�b�N�O���E���h�Đ��̎w��
bit=32, I2S���r�b�g�T�C�Y�i��������p�j
repeat=0, ���s�[�g����
end_mute=False �Đ���̏����i�m�C�Y��j
button=None, button_on=False ��~�{�^���A��~�{�^��ON����
audio.check_play() ���m�F
audio.stop() ����~
�}�C�N���g��Index
������
- �� I2S�̃`�����l����2�`�����l������܂����A�Đ�/�^���ł̓`�����l��0�����g���܂���B�܂��Đ�/�^���͓����ɂ͎g���܂���B
�^��
���ɔ������Ď����Ř^�����܂��B�^���J�n�ɕK�v�ȉ��ʂ̓��[�p�X�A�}�C�N���x���Őݒ肵�܂��B�^���f�[�^�̓t�@�C���ɂ��ۑ��ł��܂��i���X�|���X�������܂��j
buff = bytearray(framerate*10+44) # 10 Sec
rec_size= wave.mic_recording_auto(mic, �^���f�[�^�̊i�[�ꏊ�i������ / �t�@�C�����jbuff,
�t���[�����[�g12000, ���[�p�X8, �}�C�N���x��6)
�I�v�V����(�ȗ��A�l�͏����l)
chunk_size=6000, �^���̍ŏ��P�ʁi�t���[�����[�g�̔������w�肷���0.5�b�j
block_size=48000, �����F�����������ŏ��P�ʃu���b�N�P�ʁi�ʏ�t���[�����[�g��4�{�j
sc=3, nc=2, debug=False, cv=False, shift=0
MicroPython�ŃO���t�B�b�N���g���Ă݂�B
�t���f�B�X�v���C���g�� [ original���r���h�� ]Index
������
M5Stack Core2 / Fire��LCD��SD������SPI�o�X�ɐڑ�����Ă���̂ŁA���p�o����悤��"russhughes/st7789_mpy"���C�����Ă��܂��B
�}���`�v���b�g�t�H�[���Ȃ̂�M5Stack�̃n�[�h�E�F�A�ɓ������Ă��Ȃ��̂��Ǝv���܂��B
�t���f�B�X�v���C���g�� [ original���r���h��[S3] ]Index
������
�`��Ȃǂ̎g�����͂�������Q�Ƃ��Ă��������B�� ESP_LCD MicroPython driver for ESP32-S3 Devices with ST7789 or compatible displays.
�t���f�B�X�v���C���g�� (framebuf)Index
������

�t���f�B�X�v���C���g�� [ loboris���r���h�� ]Index
������
�`��
�ڂ����́c display�Eloboris/MicroPython_ESP32_psRAM_LoBo Wiki�EGitHub�t���f�B�X�v���C���g�� [ loboris���r���h�� + LovyanGFX ] (2020/08/07-)Index
lovyan03����̒������O���t�B�b�N���C�u����LovyanGFX��MicroPython�ł��g����悤�ɂ��܂����Bdisplay���W���[���Ƌ����o���܂���A�ʓr���r���h���K�v�ł��B
MicroPython[loboris+lovyan03���r���h��] �_�E�����[�h (�����o�[�W����)
- �� MicroPython�Ή��ɂ�������lovyan03����ɂ��Ή������܂����B���̏����Ċ��Ӑ\���グ�܂��B
������
LovyanGFX�ŃC���[�W�f�[�^��\������
lgfx.drawJpg(data, 0, 0) �o�b�t�@�Ɋi�[���ꂽ�C���[�W�f�[�^,x, y�̈ʒu�w�肪�o���܂�
�C���[�W�f�[�^��A���\������ (2019/04/09-)Index
M5Stack [ loboris���r���h�� ]
MicroPython�Ńt�@�C���V�X�e�����g���Ă݂�B
SD�J�[�h���}�E���g����Index
������
SPI�C���^�[�t�F�[�X���g���ۂ̃g���u������Index
ESP32���W���[���ɂ�HSPI�AVSPI(ESP32��C/S���Ƃ��ꂼ��SPI2_HOST=1�ASPI3_HOST=2)��2�n����SPI�C���^�[�t�F�[�X���p�ӂ���Ă��܂��B�iFlash��psRAM�p�͕ʁj
M5Stack Core2 / Fire / Basic
SD�J�[�h�X���b�g��LCD�̓C���^�[�t�F�[�X(VSPI)�����L���Ă��܂��B�O���pSPI�[�q��VSPI�ɐڑ�����܂��BSD�J�[�h��LCD���ɃA�N�Z�X����ۂɂ͒��ӂ��K�v�B
MicroPython [ loboris ] �ł�SPI��DMA
SPI��DMA���g�p���Ă���MicroPython [ loboris ] �ł͌��L�ɌŒ肳��Ă��܂��B- �E LCD (DMA1)
- �E SD�X���b�g (DMA2)
- �E �O��SPI�@�� (DMA1)
[SPI_UTILS]: spi initialization failed with rc=0x103
MicroPython�ŃZ���T�[���g���Ă݂�B
�W���C���A�����x�A�n���C�Z���T���g��Index
�Ȃ�ׂ����ʉ��ł���悤�Ƀv���O�������L�q���Ă��܂��B�ݒ�l�͊e�Z���T�[�̎d�l�ɂ��܂��B
Madgwick�t�B���^���g�� [ original���r���h�� / loboris���r���h�� ]Index
Madgwick�t�B���^���g�����ɂ�胍�[���A�s�b�`�A���[�p�������x�Ɏ擾�ł��܂��B- �� �Z���T�[���L�����u���[�V��������Ă��Ȃ��ƃh���t�g���܂��B
MicroPython��Bluetooth���g���Ă݂�B
Bluetooth(Classic)���g�� [ loboris���r���h�� + btstack ] (2019/08�`)Index
Bluetooth�Ɋւ�����͏��Ȃ��̂�MicroPython�Ɏ�������̂͋�J���܂����B���W���[����������Ă��܂����Ƃ̈����͊ȒP�ł��B
���܂̂Ƃ���btstack�Ƃ̑g�ݍ��킹���ƂĂ����肵�Ă܂��Bbtstack�͓o�ꂩ�炩�Ȃ�o���Ă��邱�Ƃ���������������������ă\�[�X�R�[�h���ǂ݂₷���A�T���v���R�[�h���[�����Ă��܂��B�ł�API�\��(BLE ANCS Client API)���Ǝ��Ȃ̂�MicroPython�̃��W���[���ɂ���̂͂�����Ɩʓ|�ł��B����MicroPython(ESP32)��Bluetooth(BLE)�ɑΉ����܂����B�N���V�b�N�ɂ͑Ή����ĂȂ��悤�ł��B����btstack���g���K�v��������Ă��邩������܂���B
- �� Callback���[�`�����ł̃������m�ۂ̓G���[�̗v���ɂȂ�܂��Bglobal�̎g�p�𐄏����܂��B
- �� run_loop_execute()���g����Python�ɐ��䂪�߂�Ȃ����߁Arun_noloop_execute(timeout_ms)��lj�
sixaxis (DUALSHOCK3)
DUALSHOCK3�̃f�[�^�ڎ擾���邱�Ƃ��o���܂��B- �� DUALSHOCK3��PlayStation�ȊO�Ŏg�����߂ɂ͎��O�̏������K�v�ł��B
Windows�̏ꍇ�́A������Ѓx�X�g�e�N�m���W�[�����SIXAXIS�̐ݒ����ڂ����ł��B
��L�����N����擾�ł��� sixpair ���g���ăz�X�g��(M5xxxxx)��MAC�A�h���X�� DUALSHOCK3�ɏ������݂܂��B �z�X�g����MAC�A�h���X�͉��L�� sixaxis.read_mac() �Ŏ擾�ł��܂��B
USB ���̓f�o�C�X�ŔF������Ă���Ƃ���DUALSHOCK3�Ƃ��ĔF������Ă��܂���A���܂��ڑ��o���Ȃ��Ƃ���DUALSHOCK3�����Z�b�g���܂��B
spp[Server] (Serial Port Profile)
���z�V���A���|�[�g�Ƃ��ē��삵�܂��BPC���̐ݒ�͒��M�i�f�o�C�X���ڑ����J�n����jspp[Client] (Serial Port Profile)
���z�V���A���|�[�g�Ƃ��ē��삵�܂��BPC���̐ݒ�͔��M�i�R���s���[�^���ڑ����J�n����jhid (Wii Remote/Other)
Wii�����R���Ȃǂ�HID�^�C�v�̃Q�[���R���g���[������f�[�^�ڎ擾���邱�Ƃ��o���܂��Bhid[Slave] (Keyboard/Mouse)
HID�̃X���[�u��������܂��B�L�[�{�[�h�A�}�E�X�Ƃ��ċ@�\���܂��Bhci�p�P�b�g��Android�ŃL���v�`�����ĉ��







Bluetooth(BLE)���g�� [ original���r���h�� ] (2023/04�`)Index
ESP32S3����Classic�͔�Ή��ɂȂ�BLE�̂ݑΉ��ƂȂ�܂����BAPI��NimBLE�x�[�X�ɂȂ��Ă��܂��B
BLE Keyboard
AtomS3��BLE Keyboard�ɂ����ł��BHeerkog����hid_services.py��g�ݍ���ł��܂��B
�I���W�i��UUID�̐���
������Ő����ł��܂��Bversion1���w�� https://www.uuidgenerator.net/version1MicroPython�Ńl�b�g���[�N���g���Ă݂�B
Wi-Fi �A�N�Z�X�|�C���g�ɐڑ�����Index
import network
import setting SSID,PASSWARD��ۑ������ݒ�t�@�C��
if 'ap_if' not in locals():
ap_if = network.WLAN(network.STA_IF)
if not ap_if.isconnected():
ap_if.active(True)
ap_if.connect(setting.MY_SSID, setting.MY_PASSWARD)
while not ap_if.isconnected(): �ڑ��҂�
print(".", end='')
time.sleep(0.1)
FTP�T�[�o�[�ɐڑ�����Index
[ original���r���h�� ]
ftp.ftpserver()
�ȈՃo�[�W�����ł��B�N���C�A���g���Z�b�V���������ƏI���B1 �̃Z�b�V�����݂̂��T�|�[�g����܂��B
MicroPython��CPU������g���Ă݂�B
DeepSleep���g��Index
DeepSleep���͏���d�͂�ߖ�ł��܂��B
����N���b�N��ύX����Index
����N���b�N�ɂ�2MHz, 80Mhz, 160MHz, 240MHz���w��ł��܂��B
machine.freq(240) �C�ӂ̓���N���b�N���w��A�ȗ������ꍇ�͌��݂̃N���b�N��Ԃ��܂��B
- �� DeepSleep�ƈႢ�N���b�N�ύX��ł����̂܂܃v���O���������삵�܂��B�������ʐM�n�̋@�\���g���Ă���ꍇ�Ȃlje�����N����\��������܂��B
- �� loboris�ȊO�ł�MHz�̎w�肪�o���Ȃ��悤�ł��B240MHz��240000000Hz�ɂȂ�܂��B
MicroPython�Ńf�o�C�X���g���Ă݂�B
PMIC���g��Index
MicroPython����p���[�}�l�W�����gIC AXP192�ɃA�N�Z�X����Bi2c = machine.I2C(sda=21, scl=22)
pm=axp192.AXP192(i2c)
RTC���g��Index
MicroPython���烊�A���^�C���N���b�NBM8563�ɃA�N�Z�X����Bi2c = machine.I2C(sda=21, scl=22)
rtc=bm8563.BM8563(i2c)
rtc.GetBm8563Time() (�N, ��, ��, ��, ��, �b, �T)���߂�܂��B
rtc.GetTime() (��, ��, �b)���߂�܂��B
rtc.SetTime(Hours, Minutes, Seconds) ���Ԃ�ݒ肵�܂��B
rtc.GetData() (�N, ��, ��, �T)���߂�܂��B
rtc.SetData(Year, Month, Date, WeekDay) ���t��ݒ肵�܂��B
�J�������g��Index
DualShock/2���g��Index
DualShock/2��SPI�C���^�[�t�F�[�X�ŒʐM�ł��܂��BDualShock/2�̎����͂����炪�ڂ����ƂĂ�������₷���ł��B
�v���C�X�e�[�V����2��p���[�����O�X�C�b�`�Z�p����
������
MicroPython��WebAPI���g���Ă݂�B [ original���r���h�� ]
�T���v���R�[�h�̎��s�ɂ̓��r���h�ς݂̃C���[�W�t�@�C�����K�v�ɂȂ�܂��B
MicroPython�����r���h�������Q�Ƃ��Ă��������B
Google Cloud Speech-to-Text ��WebAPI�Ŏg�� (2024/01�`)Index
wave�f�[�^�̐������}�C�N���g�����Q�Ƃ��Ă��������B- �� �������̂��߃������Ɋi�[����wave�f�[�^�����̂܂�Base64�G���R�[�h���ē]�����Ă��܂��B
Base64�G���R�[�h��chunk_size���Ƃɕ������čs�����ƂŃ�������啝�ɐߖĂ��܂��B - �� �^�����Ԃ�L�������A�������͓��ڃ����������Ȃ����wave�f�[�^���t�@�C���o�R�ň����K�v������܂��B
ChatGPT AI�`���b�g�{�b�g��WebAPI�Ŏg�� (2023/04�`)Index
VOICEVOX��WebAPI�Ŏg�� (2023/04�`)Index
VOICEVOX�T�[�o�[�̋N�� (Windows)
VOICEVOX�T�[�o�[�ւ̃��N�G�X�g
import webapi �T�|�[�g���W���[��
address="VOICEVOX�T�[�o�[�̃A�h���X:50021/"
res1 = requests.post(address+'audio_query?text='+webapi.encode_url_string(content)+'&speaker=1&outputStereo=false')
res2 = requests.post(address+'synthesis?speaker=1&outputStereo=false',data = res1.text.encode("utf-8"))
�L�����N�^�[�{�C�X��ς���Ƃ���speaker�̒l��ς��܂��B
webapi.play_wav(res2.raw, spk) # !caution instance variable �C���X�^���X�ϐ����Q�Ƃ��Ă���̂ŗv����
- �� wave�f�[�^���o�b�t�@������ɒ���I2S�ɏ������݂��邱�ƂŃ�������ߖč��������Ă��܂��B










Attic or Garret ���̊e�L���C�ʐ^�y�щ������e�҂ɖ��f�œ]�ڂ��邢�͏��ƖړI�ŗ��p���邱�Ƃ��ւ��܂��B
Copyright © 1996-2021 Itoi.All Rights Reserved.